А вы сможете? spacex выпустила реальный симулятор стыковки crew dragon с мкс
Содержание:
Создание технологии
Проблема стыковки встала перед создателями космических аппаратов вплотную в частности в связи с программой осуществления пилотируемых облётов Луны и высадок на Луну. Первые технически реализуемые предложения по стыковке относятся к 1962 году.
Одной из ступеней к созданию самой технологии стыковки стал Первый групповой полет пилотируемых кораблей который состоялся 12 августа 1962 года с участием корабля «Восток-3» и корабля «Восток-4» выведенным на орбиту спустя сутки. Максимальное сближение кораблей составило порядка 6,5 км.
Стыковка в частности позволяла осуществить полёт пилотируемых экспедиций на Луну — достигалась существенная экономия массы лунного корабля за счёт того, что на Луну садился и с Луны взлетал не весь корабль, а только специальный максимально облегчённый и неспособный к посадке на Землю лунный посадочный модуль корабля. Лунный посадочный и орбитальный модули корабля использовали стыковку в реализованной американской программе «Аполлон» и в неосуществлённой советской программе Л3. Также готовился к полётам вариант корабля «Союз-Контакт» для отработки системы стыковки «Контакт» модулей 7К-ЛОК и ЛК советского комплекса Л3, но в связи с недоведением программы лунного посадочного модуля Л3 до стадии пилотируемых полётов, необходимость полётов «Союза-Контакта» отпала.
Первое в мире сближение двух пилотируемых кораблей было произведено 15 декабря 1965 года кораблями США «Джемини-7» и «Джемини-6A». Максимальное сближение кораблей составило порядка 30 сантиметров.
Первая в мире стыковка в ручном режиме была осуществлена 16 марта 1966 года пилотируемым кораблём США «Джемини-8» с ракетной ступенью «Аджена» запущенной 100 минутами ранее.
В апреле 1967 года должна была состояться первая в мире стыковка двух пилотируемых кораблей корабля «Союз-2А» с кораблем «Союз-1», но в связи с неполадками в полете «Союз-1» запуск второго корабля был отменен.
Первая в мире полностью автоматическая стыковка двух космических аппаратов произведена 30 октября 1967 года беспилотными вариантами кораблей «Союз» «Космос-186» с «Космос-188»».

Первая в мире стыковка двух пилотируемых кораблей была осуществлена 16 января 1969 года кораблем «Союз-4» с «Союз-5». Переход экипажа из одного корабля в другой осуществлялся путем выхода в открытый космос.
Первая в мире стыковка двух пилотируемых кораблей с переходом экипажа через стыковочный узел была осуществлена в марте 1969 года во время полета «Аполлон-10» на лунной орбите.
Первая в мире стыковка двух пилотируемых кораблей при высадке Луну была осуществлена в июле 1969 года во время полета «Аполлон-11».
Первая в мире стыковка пилотируемого корабля с космической станцией и переходом экипажа была осуществлена 7 июня 1971 года кораблем «Союз-11» со станцией «Салют-1».
Первая в мире стыковка двух пилотируемых кораблей разных государств была осуществлена в июле 1975 года кораблем США «Аполлон» с кораблем СССР «Союзом-19» в рамках проекта «Союз — Аполлон».
Стыковки очень широко использовались в лунной программе «Аполлон», для создания и снабжения орбитальных станций, как в СССР/России («Салют-ДОС», «Алмаз-ОПС», «Мир»), так и в США («Скайлэб», полеты к станции «Мир»), Китая («Тяньгун-1», «Тяньгун-2») а в настоящее время — Международной космической станции.
«Захлестывают эмоции»
После запуска в рамках транслировавшейся на сайте NASA пресс-конференции основатель компании SpaceX Илон Маск заявил, что человечество может гордиться кораблем Crew Dragon, на котором американские астронавты отправились на МКС.
— Безусловно, этот запуск найдет отклик у всех тех, кто в душе исследователь. Меня самого захлестывают эмоции. Мы теперь должны будем безопасно вернуть астронавтов на Землю и сделать так, чтобы это повторялось вновь и вновь, — заявил Маск на брифинге с журналистами в Космическом центре имени Кеннеди.
Во время пресс-конференции Илон Маск неожиданно вспомнил и шестилетней давности твит главы «Роскосмоса». В 2014 году Дмитрий Рогозин, еще будучи вице-премьером, прокомментировал вводимые против нашей страны санкции в космической отрасли и написал, что Россия может отказаться доставлять американских астронавтов на МКС. «Проанализировав санкции против нашего космопрома, предлагаю США доставлять своих астронавтов на МКС с помощью батута», — пошутил тогда он.
— Батут работает, — заявил Маск 31 мая.
космос
 Фото: NASA
Фото: NASA
В «Роскосмосе» в ответ поприветствовали успешный запуск Crew Dragon и отметили важность наличия двух транспортных систем, способных обеспечить доставку экипажей к МКС. «Очень важно иметь хотя бы две возможности долететь до станции
Ведь мало ли что… В космосе всякое случалось, и обязательно надо иметь минимум две транспортные системы, способные обеспечить присутствие экипажей разных стран на борту МКС», — написал официальный представитель госкорпорации Владимир Устименко в своем Twitter
«Очень важно иметь хотя бы две возможности долететь до станции. Ведь мало ли что..
В космосе всякое случалось, и обязательно надо иметь минимум две транспортные системы, способные обеспечить присутствие экипажей разных стран на борту МКС», — написал официальный представитель госкорпорации Владимир Устименко в своем Twitter.
Эксперты считают, что полет Crew Dragon откроет новую эру в мировой космонавтике.
— Состоявшийся полет уравнивает по космической мощности «Роскосмос» и компанию SpaceX. Причем у Илона Маска работают 6 тыс. человек. А в «Роскосмосе» — около 240 тыс., — сказал «Известиям» руководитель Института космической политики Иван Моисеев. — Думаю, в итоге РФ потеряет деньги, которые получала за транспорт американцев на МКС, — в лучшие годы эта сумма составляла от $300 до $500 млн в сегодняшних ценах.
В пресс-службе «Роскосмоса» «Известиям» сообщили, что ценовая политика отправки космонавтов из других стран на МКС являет собой коммерческую тайну.
— Что же касается освободившегося места на кораблях, оно будет использовано для реализации российской научно-исследовательской программы, — сообщили в госкорпорации. — На местах американских космонавтов полетят российские.
Процесс
Процессу стыковки предшествует дальнее сближение, затем ближнее, затем с причаливания начинается собственно стыковка. Специальные выступающие элементы стыковочных агрегатов входят в механическое зацепление, после чего начинается стягивание объектов, по окончании которого происходит сцепка замков. В этот момент электро- и гидроразъёмы уже соединены. Далее проверяется герметичность стыка, после чего можно открыть люки и переходить из объекта в объект.
При стыковке объектов большой массы (более массы транспортного корабля класса «Союз» или «Прогресс», близкой к 7 тоннам) стык дополнительно усиливается изнутри съёмными стяжками.
Если получившийся составной объект будет находиться в состыкованном состоянии достаточно долго, то возможен частичный демонтаж стыковочных механизмов и замена их на компактные плоские люки.
Космос в частные руки
Crew Dragon — первый пилотируемый аппарат, созданный частной компанией. Значение частного бизнеса для будущего пилотируемой программы США отметил и Дональд Трамп.
— На примере США мы видим, что всё большую роль в развитии космонавтики играет не государство, а частные инвестиции, — рассказал «Известиям» член-корреспондент Российской академии космонавтики Андрей Ионин. — В России такую систему создать не удалось. В 2000-х мы отставали в спутникостроении, зато лидировали на рынке запусков пилотируемых кораблей. Руководители страны ставили в вину «Роскосмосу», что РФ превратилась в «космического извозчика». Но компания зарабатывала деньги. Сейчас эта завеса, которая скрывала положение нашей космической отрасли, упадет.
космос
 Фото: NASA
Фото: NASA
Гендиректор компании «КосмоКурс» Павел Пушкин считает, что теперь американцы начнут собственную коммерческую деятельность по отправке экипажей на МКС.
— У них изначально стояла задача возить своих астронавтов на своих ракетах и кораблях, — пояснил «Известиям» предприниматель. — Но при этом они не откажутся от коммерческих перевозок и партнеров — например, из Японии. Конечно, мы останемся лидерами на этом рынке. Но США по части доставки астронавтов станут от нас более независимы.
В «Роскосмосе» тем временем заявили о новых космических проектах: в 2020 году запланированы испытания двух новейших ракет. А в 2021 году, сообщили в корпорации, будет возобновлена и лунная программа.
Примечания[править]
- Если быть точным, аббревиатура АПАС относится только к системам советской/российской разработки; иностранные и международные аналоги, даже разработанные на основе АПАСов, называются иначе. Но суть та же.
- Кроме того, желательно не путать с Апас — что есть персонифицированные космические воды у индусов. Сома и всё такое прочее.
- Что потребовало бы нестандартных и очень мощных ракет-носителей.
- Посадочный и возвращаемый модули друг с другом не стыкуются, а крепятся на одноразовых креплениях. А вот сменные разгонные блоки можно было бы и пристыковывать, проблема в том, что у этих блоков нет ни мозгов, ни стыковочного узла (см. двигатели).
- Не столько «вместо», сколько параллельно. Штырь-конусы используются до сих пор — в частности, «Союзы» и «Прогрессы» летают на МКС именно со штырями. Да и в том самом полёте переходный отсек с АПАСом был пристыкован к «Аполлону» старым добрым штырь-конусом.
- юмористические расшифровки: DOS — Durable Orbital Station (а что здесь юмористического-то? Банальный дословный перевод русского термина «Долговременная орбитальная станция»).
- В «Дипломатическом иммунитете» Майлз вынужден отстыковать тяжёлый корабль от станции — и беспокоится о том, что не сумеет пристыковаться обратно. Вариант «просто включить автомат стыковки» ему даже в голову не приходит.
Примечания
- John Cook. . Houstan, Texas: Boeing (1 Jan 2011). — «Docking is when one incoming spacecraft rendezvous with another spacecraft and flies a controlled collision trajectory in such a manner so as to align and mesh the interface mechanisms. The spacecraft docking mechanisms typically enter what is called soft capture, followed by a load attenuation phase, and then the hard docked position which establishes an air-tight structural connection between spacecraft. Berthing, by contrast, is when an incoming spacecraft is grappled by a robotic arm and its interface mechanism is placed in close proximity of the stationary interface mechanism. Then typically there is a capture process, coarse alignment and fine alignment and then structural attachment.». Дата обращения 31 марта 2015.
- ↑ . NASA (17 марта 2009). — «Docking: The joining or coming together of two separate free flying space vehicles». Дата обращения 4 марта 2011.
- . NASA (4 ноября 2004). — «Berthing refers to mating operations where an inactive module/vehicle is placed into the mating interface using a Remote Manipulator System-RMS. Docking refers to mating operations where an active vehicle flies into the mating interface under its own power.». Дата обращения 4 марта 2011.
- . РИА Новости (9 марта 2020). Дата обращения 11 марта 2020.
- ↑ . NASA. Дата обращения 3 октября 2018.
- . Дата обращения 23 июня 2010.
- NSTS 21492 (Basic) «Space Shuttle Program Payload Bay Payload User’s Guide» (2000), Lyndon B. Johnson Space Center, Houston Texas
- . Interfax.ru. Дата обращения 23 сентября 2019.
- . ТАСС. Дата обращения 23 сентября 2019.
- .
- . NASA. — «Atlantis will carry the Russian-built Docking Module, which has multi-mission androgynous docking mechanisms at top and bottom». Дата обращения 28 декабря 2011.
- . Astronautix. Дата обращения 7 апреля 2018.
- Hartman. . NASA (23 July 2012). Дата обращения 10 августа 2012.
- Lupo. . NASA (14 июня 2010). Дата обращения 22 августа 2011.
- Hartman. . NASA Advisory Council HEOMD Committee (July 2014). Дата обращения 26 октября 2014.
- Pietrobon. (August 20, 2018). Дата обращения 21 августа 2018.
- Bayt. . NASA (26 июля 2011). Дата обращения 27 июля 2011.
Стыковка Crew Dragon с МКС онлайн
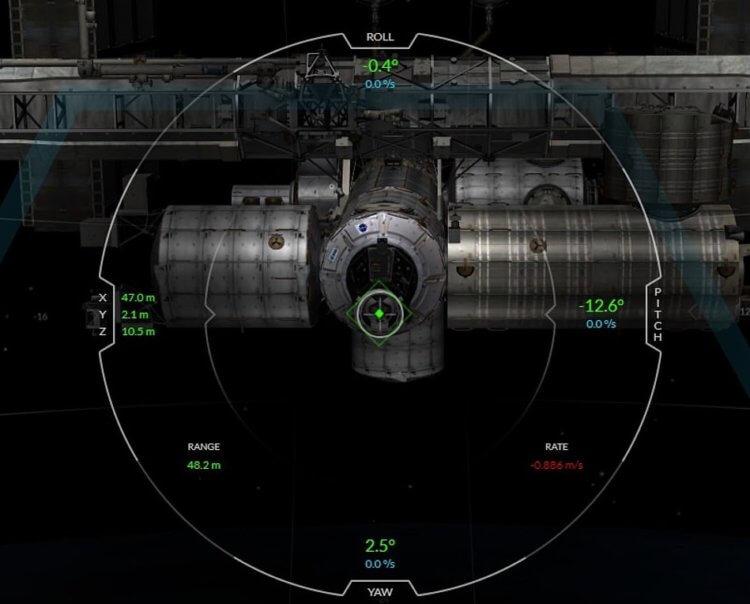
После запуска симулятора вы увидите корабль Crew Dragon, которому осталось совсем немного до стыковки с МКС. При этом ваш корабль немного искривлен относительно самой космической станции. Впереди вас ожидает виртуальный отдых на Международной космической станции, для этого сначала нужно выровнять угол, под которым корабль находится к МКС, для удачной стыковки.
К счастью, здесь есть много средств управления, чтобы зафиксировать положение космического корабля и приблизиться к станции. Но помните, что в космосе сделать это не так просто, как двигаться вперед, назад или поворачиваться, находясь на Земле.

Если нажмете один раз, и ничего не произойдет, подождите — в космосе все происходит очень медленно
Элементы управления слева служат для перемещения Crew Dragon в космосе: с их помощью вы можете управлять его движениями вперед, назад, вверх, вниз и из стороны в сторону (хотя в пространстве все это относительно). Органы управления справа управляют вращением, качкой и креном корабля. С помощью дисплея можно узнать, правильно ли вы двигаетесь. Стыковка признана успешной, если все зеленые значения в центре дисплея не выше 0.2.
Читатели в нашем Telegram-чате уже опробовали симулятор и пишут, что лучше совершать небольшие и точные перемещения, а не делать большие, внезапные движения — в этом случае вы пропустите космическую станцию полностью или случайно столкнетесь с ней. По рекомендации SpaceX, когда вы находитесь на расстоянии менее 16 футов (5 метров) от космической станции, сохраняйте скорость ниже минус 0,6 фута в секунду (минус 0,2 метра в секунду), которая отображается на дисплее.
Почти к успеху пришел!
Первая в мире автоматическая стыковка в космосе двух искусственных спутников земли
Дата: 30.10.1967
Главная / Памятные даты / Октябрь
30 октября 1967 года – Впервые в мире автоматическая стыковка в космосе двух ИСЗ – «Космос-186» (запущен 27.10.1967) и «Космос-188» (запущен 30.10.1967). Оба СА возвращены на землю.
Стыковка — одна из наиболее сложных и ответственных технических операций, которые проводятся в космосе. Для того чтобы остыковать вместе два космических аппарата, необходимо их предварительно сблизить, причем очень аккуратно с малой скоростью особенно на конечном участке, чтобы исключить соударение друг с другом. 30 октября 1967 года спутники «Космос-186» и «Космос-188» впервые осуществили автоматический взаимный поиск, сближение, причаливание и стыковку в космосе.
Сначала (27 октября в 12 часов 30 минут по московскому времени) на орбиту был выведен «Космос-186». Он — «активный» и должен с помощью радиолокационной антенны обнаружить второй спутник, подойти к нему и состыковаться. 30 октября, перед пролетом спутника «Космос-186» над космодромом, в плоскости его орбиты был запущен «пассивный» спутник — «Космос-188». Он был выведен на орбиту своего «активного» напарника с опережением его на 24 км, с задачей «смотреть» на «Космос-186», посылать ему ответные сигналы, обозначая свое местоположение в пространстве. По команде с Земли были включены установленные на спутниках системы ориентации и автоматического управления, приведены в действие счетно-решающие устройства. «Космос-186» со скоростью около 90 км/час сближался со своим напарником. Когда расстояние между спутниками сократилось до 300 м, выключилась двигательная установка, заработали двигатели малой тяги. Скорость сближения снизилась до 0,5-1 м в секунду, спутник подошел к спутнику. Затем штанга стыковочного узла «Космоса-186» вошла в конусообразный захват «Космоса-188». Таким образом, 30 октября 1967 года в 12 часов 20 минут по московскому времени была выполнена первая в мире автоматическая стыковка двух космических кораблей.
«Корабли действительно состыковались: космическое чудо свершилось, они летели вместе, связанные стыковочным механизмом… Самым важным в этом по-настоящему космическом деле оказалось то, что уникальное достижение не стало научно-техническим трюком, чтобы только показать, лишь продемонстрировать, на что способна страна Советов, как это неоднократно бывало у нас; оно положило начало целому направлению в пилотируемой космонавтике, сначала советской, а затем международной, Можно без преувеличения сказать, что автоматическая стыковка стала одним из краеугольных камней, на которых держалась и до сих пор держится техника пилотируемого космического полета».
Телевизионное изображение состыкованных аппаратов, а также телеметрическая информация передавались на Землю бортовыми радиотелевизионными установками и телеметрическими системами и принимались сетью наземных пунктов. Около двух витков вокруг Земли аппараты летали вместе как одна космическая станция. В 15 часов 50 минут 30 октября по команде с Земли была проведена автоматическая расстыковка искусственных спутников. Затем они последовательно возвратились на Землю.
Автоматическая стыковка искусственных спутников Земли – это новая выдающаяся победа советского народа в освоении космическогопространства. Была решена сложнейшая научно-техническая проблема автоматической стыковки космических аппаратов на орбите. Это открыло широкие перспективы создания больших космических комплексов, способных проводить сложные и разносторонние исследованиякосмического пространства. Именно автоматическая стыковка космических аппаратов является отличительной особенностью советской/российской космонавтики. В автоматическом режиме стыкуются к российскому сегменту МКС пилотируемые корабли “Союз”, грузовые корабли “Прогресс” и ATV. Необходимо отметить, что, в случае проблем с автоматикой, ручной режим на российских кораблях также предусмотрен.
Профессионалы в искусстве[править]
- Кербалы
Что характерно, кербальский компьютер конечно может рассчитать и выполнить стыковку, но при этом он тратит на маневр куда больше топлива чем кербал. Почему — непонятно (вероятно потому что кербалы куда лучше летают в космосе чем программируют компьютеры).
считают, что компьютеры слишком тупые, а потому все стыковочные операции делают вручную. Профессионалы 80-го уровня.
- Elite (и все его наследники) — до покупки автомата стыковки все заходы на станцию осуществляются вручную.
- Сага о Форкосиганах — все описанные в тексте стыковки выполняются пилотами, а не автоматикой. Более того, судя по некоторым эпизодам, автоматическая стыковка в этом мире вообще отсутствует как явление.
- «Космические ковбои» — престарелый «Танк», который давным-давно ушёл из ВВС и принял сан, производит стыковку шаттла со старым советским спутником, при этом молясь Господу.
- Hellion — В этом хардкорном симуляторе космобомжевания просто нет автоматической стыковки(точнее есть, но только на самой последней стадии — после сближения на метр-полтора активируется магнитный зацеп), зато есть космический мусор, инерция, ограниченное количество топлива для маневров и возможность закрутить стыкуемый объект при неудачной стыковке на большой скорости.
- Space Engineers — стыковка производится вручную, однако из-за упрощенного представления особой сложности не представляет. Впрочем, есть и написанные игроками скрипты для автоматической стыковки. Правда, через стыковочный коннектор можно передавать только ресурсы, предметы и электричество, ходить между кораблями все равно придется «через космос» (герметичный шлюз можно создать при помощи блоков слияния, но после этого отстыковаться можно будет только при помощи болгарки).
Аппаратные средства
Андрогинность
Стыковочные узлы / устройства подтягивания могут быть как неандрогинными (несимметричными, например, типа «штырь-гнездо»), так и андрогинными (симметричными, одинаковыми). От этого зависит, смогут ли быть соединены или нет пара стыковочных модулей.
Ранние системы соединения космических кораблей были проектами неандрогинных стыковочных систем. Неандрогинные конструкции — это вариант, так называемого «гендерного соединения», где каждый присоединяемый космический корабль имеет уникальный дизайн («мужской» или «женский») и играет определенную роль (пассивную или активную) в процессе стыковки. Эти роли нельзя поменять местами. В этой паре, два космических корабля одного «пола» не могут быть состыкованы.
Андрогинный стыковочный узел (также, как и андрогинная швартовка), напротив, имеет одинаковый интерфейс на обоих космических кораблях или устройствах швартовки. В андрогинном интерфейсе используется единый дизайн, благодаря которому, стыковочный узел может соединяться с точно таким же стыковочным узлом. Это позволяет менять роли (активную на пассивную), а также обеспечивает возможность спасения и совместную работу любой пары космических аппаратов.
Список механизмов / систем
| Иллюстрация | Название | Метод | Наличие внутреннего перехода для экипажа | Тип |
|---|---|---|---|---|
| Стыковочная система Gemini | Стыковка | Нет внутреннего перехода | несимметричный (неандрогинный) | |
| Стыковочная система Apollo | Стыковка | Есть внутренний переход | несимметричный (неандрогинный) | |
| Российская Система стыковки и внутреннего перехода | Стыковка | Нет внутреннего перехода | несимметричный (неандрогинный) | |
| Стыковочная система «Контакт» | Стыковка | Нет внутреннего перехода | несимметричный (неандрогинный) | |
| ССВП-G4000 | Стыковка | Есть внутренний переход | несимметричный (неандрогинный) | |
| АПАС-75 | Стыковка | Есть внутренний переход | симметричный (андрогинный) | |
| АПАС-89 | Стыковка | Есть внутренний переход | симметричный (Союз TM-16), несимметричный (Стыковочный узел станции МИР) | |
| АПАС-95 | Стыковка | Есть внутренний переход | симметричный (Шаттл, Заря и PMA-1), несимметричный (PMA-2 и PMA-3) | |
| ССВП-M8000 (гибридная система стыковки) | Стыковка | Есть внутренний переход | несимметричный (неандрогинный) | |
| Единый механизм пристыковки | Швартовка | Есть внутренний переход | несимметричный (неандрогинный) | |
| Китайское стыковочное устройство | Стыковка | Есть внутренний переход | симметричный (Шеньчжоу)несимметричный (Тяньгун-1) | |
| Система стыковки | Стыковка и швартовка | Есть внутренний переход | симметричный (Commercial Crew Vehicle, Орион)несимметричный (IDA) | |
| Международный пассивно-активный стыковочный механизм | Стыковка и швартовка | Есть внутренний переход | симметричный (андрогинный) |
Адаптеры (переходники)
Стыковочный адаптер или адаптер устройства захвата — это механическое или электромеханическое устройство, которое облегчает подключение стыковочных узлов (СУ) или устройств захвата (УЗ), оснащённых интерфейсами разных типов. Хотя такие интерфейсы теоретически могут быть парами СУ-СУ, СУ-УЗ или УЗ-УЗ, только первые два типа были развернуты в космосе до настоящего времени. Ранее выпущенные и планируемые к запуску адаптеры перечислены ниже:
- Модуль стыковки ASTP: Модуль шлюза, который преобразовывает US Probe и Drogue в АПАС-75 . Построен компанией Rockwell International для миссии «Аполлон-Союз» в 1975 году.
- Герметичный стыковочный переходник (PMA) : преобразует активный Единый механизм пристыковки в АПАС-95 . Три PMA, прикрепленные к МКС, PMA-1 и PMA-2 были запущены в 1998 году на STS-88, PMA-3 в конце 2000 года на STS-92 . PMA-1 используется для соединения модуля управления Заря с узлом Unity 1, космические челноки используют PMA-2 и PMA-3 для стыковки.
- Международный стыковочный адаптер (IDA) : Преобразует АПАС-95 в стыковочную систему НАСА (NDS) . IDA будет размещен на каждом из двух открытых PMA МКС, оба из которых будут расположены на модуле Гармония. IDA-1 планировалось доставить к МКС на SpX CRS-7 и подсоединить к PMA переднего стыковочного узла модуля Гармония, но произошла авария и корабль с грузом был утерян. IDA-2 был запущен на SpX CRS-9 и подсоединён к переходнику PMA-2 переднего стыковочного узла модуля Гармония. IDA-3 — замена для IDA-1 был доставлен к МКС на SpX CRS-18 и его планируется установить на переходнике PMA-3 зенитного стыковочного узла модуля Гармония. Адаптер совместим с Международным стандартом стыковочной системы (IDSS), что является попыткой Многостороннего координационного совета МКС создать единый стандарт стыковки.