Автопилот в самолете
Содержание:
- Проблемы автоматического управления самолетами
- Насколько опасно попадание в зону турбулентности?
- Правила полетов по приборам
- Краткая история создания автопилота
- Определение слова «Автопилот» по БСЭ:
- Выбор адаптера CAN-шины
- Self-Driving Car от Google
- Эмуляция сигнала датчиков
- Что будет, если молния ударит в самолёт или в него влетит птица?
- Автопилот в других транспортных средствах
- Может ли пассажир разбить иллюминатор или сам открыть дверь?
Проблемы автоматического управления самолетами
Конечно же, первоочередной и самой главной проблемой при создании автопилотов является сохранение безопасности полета. В большинстве старых автоматических систем управления пилот имеет возможность в любое время произвести срочное отключение автопилота и перейти на ручное управление. При нарушении или поломке автопилота крайне необходимо отключение системы обычным способом или механическим. В аппарате Ту-134 возможно проведение «отстрела» автопилота установленным пиропатроном. При разработке автопилота тщательно продумываются варианты его отключения в случае поломки без вреда для полета.

Для повышения безопасности автоматика управления работает в многоканальном режиме. Параллельно могут работать сразу четыре системы пилотирования с одинаковыми параметрами и возможностями. Также система проводит постоянный анализ и мониторинг входящих информационных сигналов. Полет осуществляется на основе так называемого метода кворумирования, который состоит из принятия решения по данным большинства систем.
В случае поломки автопилот способен самостоятельно выбрать дальнейший режим управления. Это может быть переключение на другой канал управления или передача управления пилоту. Для проверки работы систем необходимо проводить так называемый предполетный прогон систем. Данный тест состоит из запуска пошаговой программы, которая подает имитацию сигналов полета.
Все же ни одна проверка не позволяет достичь 100%-й гарантии безопасности и работы в полете. Из-за нестандартных ситуаций в воздухе могут возникать дополнительные проблемы с автоматикой управления. Некоторые автопилоты имеют различные программы, которые позволяют наиболее безопасно проводить полет соответствующего авиалайнера.
Все же полет на одном автопилоте без человеческого фактора очень опасен и практически невозможен. Можно сделать один логический вывод, что чем «умнее» самолет и сложнее его конструкция, тем меньше шансов на полет без человеческого вмешательства. Чем больше новых автоматизированных систем используется, тем значительнее возрастают шансы на их отказ в полете. Просчитать все варианты отказа практически невозможно. Именно поэтому навыки пилота останутся востребованными постоянно, поскольку каждый летчик проходит очень большой путь к управлению пассажирскими лайнерами. Соответственно, навыки и быстрое принятие решений остаются более важными, нежели действия компьютерных программ.
Самые современные системы автоматического управления типа fly-by-wire позволили значительно снизить общую массу конструкции самолета. При этом надежность бортовых систем возросла в разы. Оборудование реагирует без промедлений, а также способно исправлять ошибки, вызванные человеческим фактором при управлении. Это говорит о том, что система не позволит пилоту завести машину в опасную для нее и пассажиров на борту ситуацию. Современные самолеты типа Airbus перестали комплектоваться стандартными рычагами и педалями управления, вместо этого устанавливаются джойстики. Все это позволяет пилотам не задумываться над тем, какую команду и как необходимо передать отдельному агрегату. Не нужно продумывать угол отклонения элеронов или закрылок, достаточно наклонить джойстик управления – и компьютер сделает все сам.
Все же, несмотря на всю радужную картину, по вине автопилотов произошло немало крушений и аварий, которые привели к человеческим жертвам. История авиакатастроф по вине автоматических систем управления, к сожалению, очень богата фактами ненадежности таких систем.
Насколько опасно попадание в зону турбулентности?
В фильмах часто можно увидеть сцены, как самолёт попадает в турбулентность, получает страшные повреждения и начинает падать. В жизни же такое происходит редко. Обычно турбулентность доставляет больше проблем непристёгнутым пассажирам, чем пилотам. Вот что говорит о полётах во время турбулентности американский пилот Патрик Смит:
Так что бояться турбулентности не стоит, вряд ли самолёт упадёт из-за неё. Но во время прохождения такой зоны всегда следует пристёгиваться, чтобы избежать травм. Однако у аэрофобов есть и другие страхи, например, что в самолёт попадёт молния, и он рухнет вниз.

Правила полетов по приборам
По мере развития спроса на коммерческие перелеты встал вопрос о планировании рейсов. Любая неподходящая погода в точке вылета, прилета или на пути могла привести к отмене рейса. Увеличивающийся поток трафика требовал от пилотов более точного выполнения процедур, а уворачиваться от других самолетов становилось все сложнее. Научно-технический прогресс тоже не стоял на месте. Все это привело к появлению новых правил.
Правила полетов по приборам (ППП, Instrument Flight Rules, IFR) опираются на тот факт, что на протяжении любой части полета пилот может иметь ограниченную видимость.
Становятся возможными полеты в облаках, на больших высотах, посадки при очень плохой видимости. Одновременно, такие полеты становятся требовательнее к оборудованию и обслуживанию.
- маневрирование выполняется по искусственному авиагоризонту. При его отказе используются комбинированные данные с других приборов – высотомера, тахометра, магнитного компаса, часов, указателя скольжения и поворота
- конфликтующий трафик разводится указаниями диспетчера. Как правило, на самолетах установлена TCAS (traffic collision avoidance system, система предупреждения столкновения самолётов в воздухе), однако она используется лишь для подстраховки возможных ошибок диспетчеров
- навигация осуществляется выполнением указаний диспетчера, использованием наземных радиомаяков (VOR/DME/ADF/ILS), инерциальной системы навигации (IRS), либо спутниковой системы (GPS)
- процедуры выполняются по радиомаякам/инерциальной системе/спутникам, либо по прямым указаниям диспетчера
- управление трафиком тоже выполняет диспетчер, используя данные с радаров либо отчеты пилотов о достижении определенных точек
Приборы Airbus A321
Пилот на протяжении всего полета смотрит на приборы. Человеческий организм не предназначен для полетов, а потому ему характерны визуальные и пространственные иллюзии. Достаточно отвести взгляд от авиагоризонта на несколько секунд, чтобы обнаружить, что самолет ушел в крен или пике. Требования к точности выдерживаемых параметров также возрастают. Такие полеты требуют существенно более высокого уровня подготовки экипажа, в частности, обучения его правильным техникам сканирования приборов. Пилот, допущенный к полетам в приборных метеорологических условиях, должен иметь инструментальный рейтинг в летной лицензии.
Требования к самому самолету также значительно выше. Теперь он должен быть оснащен дополнительными приборами, такими, как авиагоризонт, указатель скольжения и поворота, указатель вертикальной скорости. Нужны приемники уже упомянутых выше навигационных маяков, радиостанция для связи, транспондер (ответчик) для предоставления диспетчеру информации о местоположении.
Так как пилот почти все время смотрит на приборы, чтение аэронавигационных карт, изменение частот и ведение бортового журнала становятся более сложными задачами. Для снижения нагрузки в самолеты часто ставят автопилот, либо летают вдвоем. Сами приборы тоже часто дублируют, да так, чтобы у них были разные и независимые источники информации – отказ приборов в отсутствие видимости может быть очень опасен.
Полеты в облаках чреваты риском обледенения, поэтому зачастую на приборных самолетах можно встретить противообледенительные системы. Фюзеляж экранируют для защиты от удара молнии, а кабину иногда оснащают погодным радаром или грозоотметчиком. С целью уменьшения вероятности столкновения в воздухе на самолеты могут дополнительно ставить вышеупомянутую систему TCAS. При заходе на посадку в условиях плохой видимости полезно знать точное расстояние до поверхности земли, поэтому на некоторые самолеты дополнительно ставят радиовысотомер. Для посадки при особо низкой видимости, когда безопасное приземление находится за пределами физических возможностей человека, используют автопилот с функцией автоматической посадки.
По сути, приборные полеты это настоящий простор для самого разнообразного (и весьма дорогого!) оборудования под всевозможные задачи. Иметь автопилот, TCAS или погодный радар совсем необязательно, но их наличие может здорово облегчить пилоту жизнь и внести существенный вклад в общую безопасность полета.
Как уже было упомянуто, по приборам летают авиалайнеры. Малая авиация тоже может летать по приборам, но большая её часть летает визуально.
Иногда можно полетать среди таких лучей
Краткая история создания автопилота
Первый автопилот в мире был создан еще в далеком 1912 году. Изобретение принадлежит американской компании Sperry Corporation, которая смогла создать систему, удерживающую самолет на заданной траектории, при этом стабилизируя крен. Это было достигнуто за счет связи высотометра и компаса с рулями направления и высоты. Связь была настроена за счет использования блока и гидравлического привода.
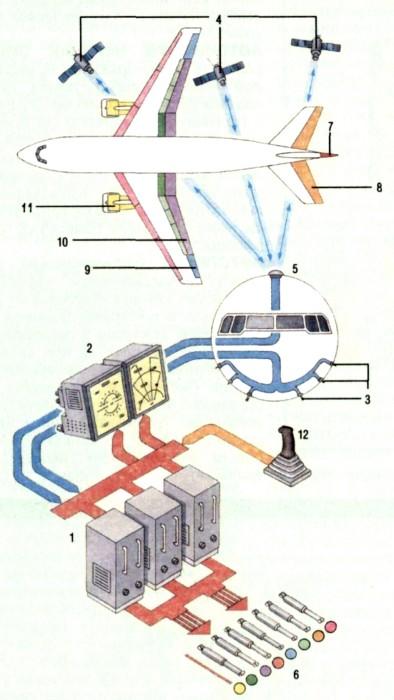
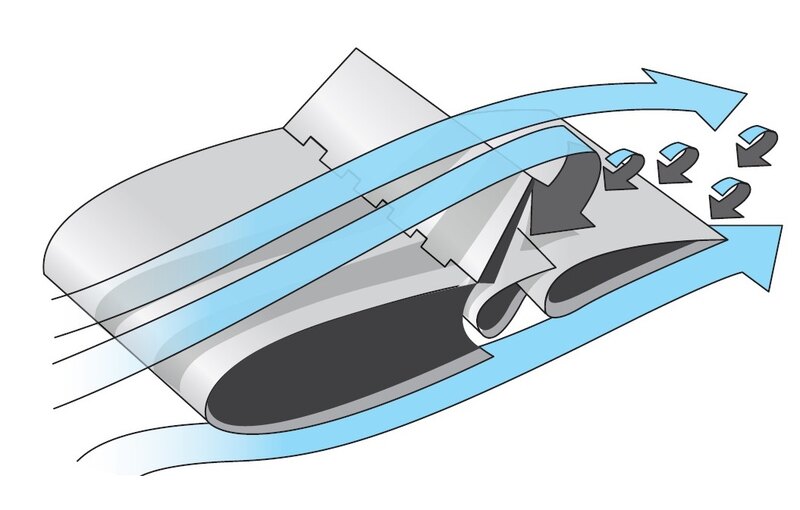
На схеме показано, как работает типичный автопилот.
Заранее рассчитанные параметры полета вводятся в компьютеры самолета (1).
После взлета автопилот вступает в действие.
Два дисплея(2)показывают положение самолета, его предполагаемый маршрут и высоту.
Изменение положения маленьких заслонок(3) на наружной поверхности самолета оповещает компьютеры о малейшем изменении в ориентации самолета.
Для определения положения используется глобальная система навигации (ГСН) (4).
Приемник расположен на верхней части корпуса (5).
Компьютеры следят за маршрутом и автоматические производят необходимые изменения посредством сервомеханизмов (6),
которые управляют рулем (7),
рулями высоты (8),
элеронами (9),
закрылками (10)
и настройкой дросселей двигателей (11)
При необходимости пилот может в любой момент отключить автопилот и перейти к ручному управлению (12)
Начиная с 30-х годов 20 века, автопилотами начали оснащать некоторые пассажирские авиалайнеры. Новый виток в развитие автоматических систем управления внесла Вторая мировая война, которая требовала подобных технологий для дальних бомбардировщиков. Впервые полностью автоматический полет через Атлантику, включая посадку и взлет, осуществил самолет C-54, принадлежавший США. Это произошло в 1947 году.
Современный этап развития автоматизированных систем управления самолетами достиг качественно нового уровня. На сегодняшний день лайнеры комплектуются системами ВБСУ или САУ. Система автоматического управления «САУ» осуществляет качественную стабилизацию судна на маршруте и в пространстве. Совокупность агрегатов системы позволяет управлять аппаратом на всех этапах полета. Самые современные разработки позволяют осуществлять полет в так называемом штурвальном режиме, это позволяет максимально облегчить работу пилота, минимизировать его вмешательство. Такие системы самостоятельно стабилизируют самолет от сноса, скольжения или болтанки, могут переходить даже на критические режимы полета, при этом очень часто игнорируя действия пилотов.
Автопилот самолета ведет аппарат по заданному маршруту, при этом используется комплексная информация навигационных приборов собственных и наземных датчиков, которые проводят анализ полета. Данная система проводит управление всеми агрегатами летательного судна. Также работают траекторные системы, которые проводят заход на посадку с высокими показателями точности без каких-либо действий пилотов.
Управляющие устройства в стандартном их виде (рычаги, педали) практически не используются. Высокая степень автоматизации довела управление до подачи электрических импульсов ко всем частям самолетов без применения гидравлики в системе управления. Электромеханические приборы управления позволяют воссоздать более привычные условия пилотам. В кабинах пилотов все чаще устанавливаются боковые рычаги управления по типу «сайдстик».
Определение слова «Автопилот» по БСЭ:
Автопилот (от Авто… и франц. pilote — водитель)устройство для автоматического управления летательным аппаратом (самолётом, вертолётом, управляемым снарядом и др.). Идея и схема А. были предложены К. Э. Циолковским в 1898. Впервые полёт самолёта, автоматически управляемый А. фирмы Сперри (США), был продемонстрирован на Всемирной выставке в Париже в 1914. Отечественный А. с пневматической исполнительной системой (АВП-1) был создан в 1932. Первоначально А. предназначался только для стабилизации угловых движений самолёта (движения относительно центра масс), что давало возможность выдерживать заданный режим полёта самолёта без участия лётчика. Усовершенствование А. позволило создать автоматизированную систему, которая производит управление летательным аппаратом не только относительно его центра масс, но также и его центром масс. Это дало возможность автоматизировать все режимы полёта летательного аппарата от взлёта до посадки. Такие А. автоматически управляют и рулями летатательного аппарата, и его двигателями. Они делают возможными полёты различных классов беспилотных летательных аппаратов (ракеты, самолёты-снаряды, искусственные спутники Земли и т.д.).А. на самолёте состоит из ряда подобных по принципу действия автоматов (курса, продольно-поперечных кренов, скорости, высоты и др.), совместная работа которых управляет полётом и стабилизует его (рис.). Чувствительные элемент каждого автомата измеряет один, определённый для него параметр режима полёта (например, или высоту, или курс), называется параметром регулирования, и вырабатывает сигнал, пропорциональный текущему значению параметра. Задатчик режимов полёта вырабатывает сигналы, каждый из которых соответствует требуемому значению определенного параметра регулирования. Эти сигналы сравниваются в вычислительном устройстве. Их разность (рассогласование) после усиления поступает на рулевую машинку А., отклоняющую соответствующий руль самолёта или орган управления двигателем. Так происходит изменение режима полёта. Когда этот режим достигает заданного, сигнал рассогласования исчезает, рулевая машинка прекращает движение и наступает положение равновесия. Устойчивость систем автоматического управления летательными аппаратами достигается как регулированием по производным от регулируемых параметров, так и отрицательной обратной связью соответствующих видов. Кроме автоматов, в А. входят системы управления и регулировки. Необходимую для работы А. энергию в виде электроэнергии или воздуха и масла под давлением доставляет двигатель самолёта.Лит.: Боднер В. А., Теория автоматического управления полётом, М., 1964.А. Л. Горелик.Рис. к ст. Автопилот.
Выбор адаптера CAN-шины
Первым делом понадобится CAN интерфейс для компьютера. Детальный обзор возможных решений есть например здесь, цены варьируются от десятков до сотен долларов. По устройствам у нас относительно доступны:
- Адаптеры в сборе с алиэкспресса. Их не пробовал, по слухам довольно много брака и софт видимо только под Windows.
- Arduino шилды на MCP2515/MCP2551, в основном клоны дизайна от seeed в любом магазине ардуинной тематики. Но совмещать такой шилд надо не с Arduino (я так и не смог заставить связку работать на воспроизведение с нужной скоростью), а с Raspberry Pi. В приложении ниже .
- USB адаптер CANHacker Baby, разработка Artemka86. Выгодно отличается от вариантов с алиэкспресса отличной поддержкой «из первых рук» от разработчика (проверено лично, Артём подходит к делу с душой). Также плюсом является поддержка стандартного протокола LAWICEL совместимого с широким набором софта.
Софта разного тоже много (за обзором опять сюда). Самый простой вариант — Linux c из SocketCAN, за который спасибо инженерам Volkswagen. Большой плюс SocketCAN в стандартизации — любое USB устройство с поддержкой протокола LAWICEL (pdf) видится системой как обычный сетевой интерфейс. Таким образом избегаем привязки к вендор-специфическому софту конкретного устройства. У текущей версии CANHacker есть небольшая несовместимость со стоковыми can-utils по работе с USB, поэтому берём патченную версию отсюда. Raspberry Pi с CAN шилдом работает со стоковым пакетом can-utils из Raspbian OS без проблем.
Self-Driving Car от Google

Ключевым
лидером на рынке беспилотных автомобилей
стала компании Google со своим проектом
Waymo. Инженеры бренда еще в 2011
году
успешно протестировали
свое оборудование
на
машинах Toyota, Lexus и Audi. Сейчас фирма начала
выпуск Self-Driving
Car.
Электрокары
от Google могут самостоятельно:
-
регулировать
скорость; -
перестраиваться
в другой ряд; -
тормозить
перед препятствиями; -
предсказывать
траекторию движения объектов; -
парковаться.

В
автомобилях Self-Driving Car отсутствует не
только руль, но и педали газа и тормоза.
Планы на будущее: сейчас, цифровой гигант обкатывает и дорабатывает свою систему, но уже в 2020 году планирует наладить серийный выпуск беспилотных машин.
Чего стоит ждать?
Разработкой
машин с автопилотом занимаются многие
компании, среди которых Nissan,
Uber, Volvo, BMW, Ford
и т.д. Но пока их системы
имеют только
2
уровень
самодостаточности. Ближе всего к созданию
полностью беспилотной машины подошли
Google,
Tesla Motors и Audi.
Именно у этих компаний есть реальный
шанс сделать автомобиль с 5 уровнем
самодостаточности в ближайшие несколько
лет.
Эмуляция сигнала датчиков
Переходим к эмуляции сигнала датчиков. Для этого поставим свой модуль в разрыв цепи между датиком и ЭБУ, будем транслировать настоящий сигнал с датчика и по команде сдвигать его на фиксированный уровень (изображая приложенное к рулевой колонке усилие). Силами одной arduino это не получится: там нет полноценного цифро-аналогового преобразователя, который мог бы выдавать постоянное напряжение. Аналоговые входы arduino нам тоже не очень подходят — хотя пинов для них целых 6, канал АЦП в контроллере только один, и его переключение между пинами занимает заметное время.
Нужно добавить к arduino внешние ЦАП/АЦП. Мне попались модули YL-40 (описание в pdf) на основе чипа PCF8591 — на каждой по 4 канала 8-бит АЦП и 1 8-бит ЦАП. Модуль может общаться с arduino по протоколу I2C. Потребуется небольшое допиливание (в буквальном смысле): китайские товарищи поставили на плату светодиод индикации напряжения на выходе ЦАП — его обязательно надо отсоединить. Иначе утекающий через диод ток не даст ЦАП поднять напряжение на выходе больше 4.2V (вместо штатных 5V). Диод отсоединяем, отковыривая резистор R4 с обратной стороны платы.
Также на входы распаяны игрушечные нагрузки (терморезистор, фоторезистор, ещё что-то), отсоединяем их, убирая перемычки, чтобы не мешались.
С интерфейсом к arduino есть нюанс — нам нужно 2 канала ЦАП, соотвественно 2 модуля, но у них одинаковые адреса I2C (зашиты в чип). Хотя чип позволяет менять свой I2C адрес, замыкая определенные ноги на +5V вместо земли, на плате эти перемычки не разведены. Вместо перепайки возьмем костыль — две разные библиотеки I2C на arduino (стандартная Wire и SoftI2CMaster), каждая на свою пару пинов. Получаем модули на разных шинах, конфликт пропадает.
Включаем arduino, открываем Serial Monitor
Важно запустить arduino первой, не останавливать и не прерывать. Иначе напряжение на выходах ЦАПов сбросится, ЭБУ усилителя определит ошибку сигнала с датчиков, уйдет в безопасный редим и придется все перезапускать по новой.
Запитываем усилитель, подключаем зажигание.
Запускаем воспроизведение лога CAN-шины.
Теперь по командам и через Serial Monitor усилитель будет поворачивать рулевой вал
Объявляется победа.
На сегодня всё, на очереди доработка софта (интеграция с CAN шиной, чтение оттуда текущего угла поворота и динамическое управление крутящим усилием, чтобы внешний контроллер мог задать фиксированный угол поворота руля и система его выдерживала), отработка на автомобиле (на стенде не смоделируешь сопротивление от колёс). Возможно замена 8-битных ЦАП/АЦП на 10 или 12 бит (взял первое, что под руку попалось). Рулящая нейросеть тоже в процессе, надеюсь скоро сделать пост.
Спасибо Artemka86 за ценные консультации по работе с CAN и помощь с оборудованием.
Что будет, если молния ударит в самолёт или в него влетит птица?
Последняя трагедия, случившаяся из-за попадания молнии в самолёт, произошла в 1963 году. С тех пор прошло уже больше 50 лет, и, разумеется, самолёты и их системы успели сто раз модифицировать. Так, в настоящее время благодаря бортовым радиолокаторам и множеству данных пилоты просто-напросто избегают попадания в грозовой фронт. Но если это всё-таки случилось, и в самолёт ударила молния, то пассажирам ничего не грозит. Вот что говорит об ударе молнии в самолёт пилот Патрик Смит:
Поэтому бояться, что вас пронзит разряд молнии, попавшей в самолёт, не нужно. Так же как и того, что он упадёт из-за птицы, попавшей в лобовое стекло или двигатель. Стекло в кабине пилотов отличается повышенной прочностью. Если в него попадёт птица (а такое случается только при наборе высоты, ведь на 9–12 тысячах метров пернатые не летают), то это грозит лишь небольшой трещиной и снятием самолёта с рейса.
Если же птица попадёт в турбину, то двигатель не прекратит работу, а лишь несколько потеряет в мощности. Обычно после такого полёт продолжается, но если повреждения высоки, то самолёт совершит вынужденную посадку в ближайшем аэропорту. К счастью, сегодня такие ситуации происходят редко, поскольку рядом со взлётно-посадочными полосами установлены отпугивающие птиц и животных системы.
Автопилот в других транспортных средствах

Складской погрузчик с автопилотом RoboCV
Понятие «автопилот» (иногда в жаргонной форме) включает в себя, помимо классического авиационного автопилота, также и системы автоматического пилотирования, вождения или управления всевозможными шагающими, колёсными, плавающими или крылатыми машинами (роботами) и развивающиеся системы автоматического управления автомобилем в условиях шоссе[источник не указан 1468 дней]. Примером канала автоматического управления автомобилем может служить система стабилизации текущей скорости движения, известная как «круиз-контроль» («автоспид», «автодрайв»).
Может ли пассажир разбить иллюминатор или сам открыть дверь?
Разбить иллюминатор под силу разве что какому-нибудь Тору с его Мьёльниром. Стёкла в них невероятно прочные и устойчивые к ударам. А перед полётом целостность иллюминаторов обязательно проверяется, чтобы исключить любую возможность декомпрессии в салоне из-за разбитого стекла. Вот что говорит по этому поводу пилот Патрик Смит:
Если уж речь пошла об иллюминаторах, то один из самых распространённых вопросов о них — зачем дырочка в иллюминаторе самолёта? Она нужна для того, чтобы нормализовать давление между слоями стекла в иллюминаторе. Без этого технологического отверстия из-за разницы давления снаружи самолёта и внутри салона иллюминатор просто бы лопнул.
Что же касается открытия дверей эвакуационных выходов во время полёта, то это невозможно даже совместными усилиями Николая Валуева, Арнольда Шварценнегера и Хафтора Бьёрнссона. Давление за бортом настолько велико, что дверь просто невозможно открыть. Никак и ни при каких обстоятельствах. К тому же, система открывания довольно сложна, и разобраться с ней с кондачка не получится. А если бортпроводник заметит, что кто-то пытается открыть дверь, то он тут же пересадит нерадивого пассажира.