10 роботов, обученные потенциально опасным для человечества навыкам
Содержание:
- Шестиногое робонасекомое, адаптирующееся к окружающей среде
- Вопросы разработки
- Сверхустойчивый робот Spot
- Hexbug подводные обитатели
- Робот-таракан пролезет везде
- Часть 1. Вступление
- Робот летучая мышь, способная ходить
- Робот-самурай, способный разрубить пополам стручок гороха
- Универсальный гуманоидный робот Hubo
- Hexbug Warriors Hexbug Warriors: боевые наножуки-роботы
- Робот Cheetah может прыгать через барьеры
- Самовосстанавливающийся робот
- Роботы-насекомые, способные прыгать по воде
- История
- Робот-геккон, ползающий по стенам и способный унести в 100 раз больше собственного веса
- Выводы, проблемы и перспективы
Шестиногое робонасекомое, адаптирующееся к окружающей среде
Этого насекомоподобного «парня» зовут Гектор. Его создали ребята из Билефельдского университета в Германии. Прототипом для его создания явилось насекомое палочник.
У Гектора имеется шесть лап, и каждой из них он может двигать независимо от других. Такая особенность свободной походки позволяет роботу быстро адаптироваться к любой поверхности, по которой он идет. Каждая нога при этом способна корректировать направление, что помогает Гектору перелезать через возникающие на его пути препятствия. Как это возможно? Каждая лапа робота состоит из трех эластичных соединений, которые ведут себя как мышцы. Сложная сеть сенсоров и датчиков дополняет лапы Гектора способностью «чувствовать» и реагировать на поверхность, к которой они касаются.
По первому взгляду сразу и не скажешь, но тело робота выполнено из углепластика, что одновременно делает его легким и очень прочным. Благодаря этому Гектор способен перевозить на себе тяжелые предметы. Ранний прототип робота весил 12 килограммов, но мог на себе унести все 30.
Если идея инсектоида, способного двигаться по любой поверхности, вас до сих пор не пугает, то исследователи собираются добавить к нему еще и специальную камеру, которая позволит ему осматривать окружающее пространство, как это делают настоящие насекомые. А мы говорили о специальных сенсорах, помогающих роботу чувствовать объекты, к которым он прикасается?
Вопросы разработки
В то время как префикс «микро» субъективно использовался в значении «маленький», стандартизация шкал длины позволяет избежать путаницы. Таким образом, нанороботы будут иметь характерные размеры или ниже 1 микрометра, или могли бы управлять компонентами в диапазоне от 1 до 1000 нм. Микроробот обладал бы характерными размерами меньше, чем 1 мм, А миллиробот имел бы размер меньше, чем см, миниробот — менее 10 см (4 дюйма), и маленький робот будет обозначен, как имеющий размер менее 100 см (39 дюймов).
Из-за небольшого размера микророботов, их создание потенциально очень дешево, и они могут быть использованы в больших количествах (множество(рой) роботов) для изучения условий, которые слишком малы или могут слишком опасны для людей или больших роботов. Ожидается, что использование микророботов будет полезным в таких видах деятельности, как поиск выживших в разрушенных зданиях после землетрясений, или, в медицинских целях, для изучения пищеварительного тракта. Чего микророботам не хватает в силе или вычислительной мощности, они могут восполнить с помощью большого их количества.
Одной из основных проблем в разработке микророботов является достижение работоспособности, используя ограниченное электропитание. В микророботах можно использовать батарейный источник питания с малой удельной массой, такой как миниатюрный элемент питания «таблетка», или использовать энергию окружающей среды, в виде вибрации или световой энергии. Также в настоящее время микророботы используют биологические моторы как источники питания, например, жгутиковые моторные белки Serratia marcescens, тянующие химическую энергию из окружающей биологической жидкости для приведения в действие автоматизированное устройство. Эти биороботы могут быть непосредственно контролируемы стимулами, такими как хемотаксис или гальванотаксис с несколькими доступными схемами управления. Популярной альтернативой батареи на борту является чтобы привести роботов, используя внешне индуцированное власть. Примеры включают использование электромагнитных полей, ультразвука и света, чтобы активировать и контролировать микророботов.
Сверхустойчивый робот Spot
Вы, возможно, уже знакомы со старшим братом «Спота» «Большим псом» (BigDog), маньяком на четырех лапах, который способен швырять бетонные блоки и перевозить на своей спине груз весом до 50 килограммов. Робот «Спот», возможно, и не такой большой, как его старший брат, но и он имеет несколько трюков, способных вас удивить. Для начала, «Спот» может быстро и легко подниматься и спускаться по крутым склонам. Он быстро бегает, хотя сам робот весит добрые 70 килограммов.
Но что еще более интересно, «Спота» невозможно сбить с ног. Он использует улучшенный механизм самобалансировки, и работает этот механизм действительно очень впечатляюще. Чтобы это доказать, создатели робота постоянно пытаются повалить «Спота» на землю. Такую попытку вы можете видеть на времени 00:28 на видео выше. Можно только надеяться, что эти навыки не отложатся в роботизированной подкорке долговременной памяти.
В другом моменте видео (1:25) мы можем видеть двух роботов «Спот», поднимающихся вместе на холм. Оба, толкаясь и тем самым друг друга корректируя, забираются на холм практически синхронно. Такое похожее на коллективное поведение не было намеренно запрограммировано. Это поведение является естественным результатом работы системы корректирования робота, что делает его еще более угрожающим.
Hexbug подводные обитатели
Hexbug Seahorse (Морской конек) — это новинка в линейке Aquabot.
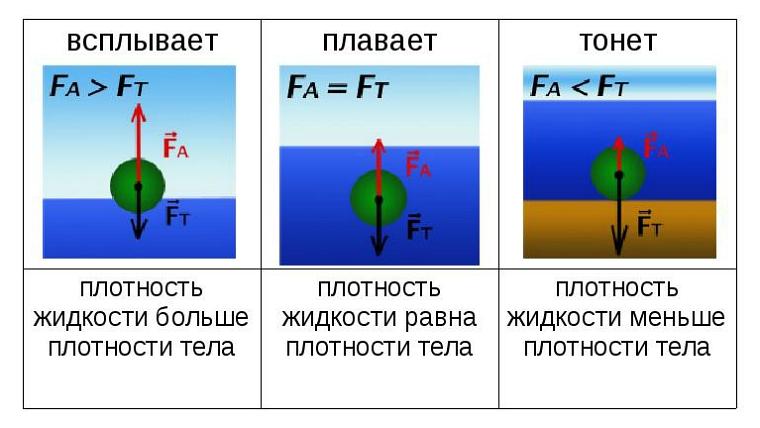
Микро-робот Морской конек плавает в толще воды, время от времени погружается глубже и всплывает к поверхности, светится встроенным светодиодом. Через пять минут засыпает и уходит в сон, для продолжения игры нужно постучать по аквариуму или вынуть игрушку из воды и погрузить снова.
Hexbug Aquabot 2.0 Deco — робот микро-рыбка Angelfish с дополнительным окрасом, который оживляет ее внешний вид, делая ее похожей на настоящую экзотическую рыбку.
Для микрорыбки не требуется особый уход. Все что нужно — это емкость и вода. Попадая в жидкость, рыбка, почувствовав комфортную для себя среду, начнет шевелить плавничками и хвостом, плавая на поверхности и исследуя окружающее водное пространство, или быстро погружаясь вглубь. Спустя 5 минут непрерывных движений рыбка заснет. Постучав по стенкам аквариума, ее можно разбудить и продолжить игру. В один аквариум можно поместить несколько рыбок, вместе им будет веселее.
Кстати за микрорыбкой можно наблюдать не только днем, но и ночью, ведь она светится в темноте!
Условия работы
Нано зомби.
Не оставляйте микро-робота под прямым воздействием солнечных лучей.
Не допускайте воздействия сильных электромагнитных полей на микро-робота.
Не храните микро-робота в условиях повышенной влажности и не допускайте попадания на него влаги.
Не подвергайте микро-робота сильным ударам и вибрации.
Не подвергайте микро-робота воздействию влаги, грязи и пыли.
Не кладите никаких предметов на микро-робота.
В периоды, когда микро-робот не эксплуатируется, выключайте питание.
При замене элементов питания утилизируйте их в соответствии с действующим местным законодатель¬ством или сдайте на вторичную переработку.
Не допускайте попадания пальцев, рук, одежды и волос и других посторонних предметов в движущиеся части изделия.
Eсли микро-робот ведет себя странно, немедленно выключите его и выясните причину. Пока проблема не решена, не включайте микро-робота снова.
Новогодний наножук.
Набор содержит мелкие части, которые могут нанести вред здоровью при попадании в дыхательные пути. Беречь от детей в возрасте до 3 лет!
Данный микро-робот рекомендован для детей старше 8 лет, дети младшего возраста могут включать микро-робота только в присутствии взрослых.
Всегда удерживайте микро-робота в поле зрения, когда он включен.
Не разбирайте и не вносите изменений в конструкцию микро-робота.
Микро-робот, имитирующий поведение муравья (Ant), подобно микро-роботу Жуку, чувствует препятствия на своем пути и умеет избегать их.
Муравей движется вперед очень быстро до тех пор, пока не упрется в препятствие. После столкновения с чем-либо, он разворачивается и начинает движение в другом направлении. Такой маленький, что помещается на ладони!
Батареи входят в комплект.
Робот-таракан пролезет везде
Роботы и тараканы — это две вещи, которые чаще всего остаются в стороне от робототехники. Но это не остановило исследовательский проект, финансируемый Армейской научно-исследовательской лабораторией США. Теперь появились еще и роботы-тараканы, которые могут протискиваться сквозь крошечные щели, как и их биологические протеже. И это уже должно вас насторожить, если попытаться представить картину в целом.
В то время как большинство роботов полагаются на свои сенсоры и продвинутое ПО, этот шестилапый робот-таракан полагается только на свое физическое состояние при выполнении задания проникновения сквозь препятствия.
Робототехники испытали три различные формы панциря робота: прямоугольную, овального конуса и просто овальную. Результаты оказались не столь удивительными: менее округленный панцирь усложняет роботу задачу проникновения через препятствия. Так они пришли к финальной форме робота.
А теперь внимание! Решив не останавливаться на развитии и без того ужасно мерзкого робота, команда инженеров уже думает о будущих роботах, которые смогут изменять свою форму по необходимости для более эффективного проникновения… к вам в дом
Часть 1. Вступление
Самые маленькие моторы
Рассмотрите заглавную иллюстрацию статьи. Там есть ракета, подводная лодка, змея и микроробот. Что-нибудь заметили схожее? Несмотря на множество отличий, включая размер, строение и происхождение, их всех объединяет способность к движению. Основа этого процесса — преобразование химических веществ или внешнего источника энергии в движение .
Для продолжения нашего путешествия важно понимать, что такое «микро», а что — «нано»? В микро-диапазон входят все объекты, имеющие размер от 100 мкм до 100 нм. Приставка «нано-» используется для объектов размером от 1 до 100 нм (рис
1).

Рисунок 1. Шкала микро-, нано- и пикоразмерных объектов
рисунок автора статьи
В статье мы часто будем использовать слова «микромоторы» и «микро-/нанороботы». Они имеют похожий, но не одинаковый смысл, поэтому давайте познакомимся с ними поближе.
- Микромоторы (микроактуаторы)
- это автономные устройства или частицы, способные преобразовывать разные виды энергии в движение.
- это управляемые устройства, способные не только двигаться, но и выполнять определенные виды задач. Например, связывать токсические вещества или контролируемо доставлять лекарства или гены в определенную область тела.
В начале мы сказали, что главная особенность всех микромоторов — это превращение одного вида энергии в движение. Но до 2002 года никто не использовал этот подход, пока группа химика Джорджа Уайтсайдса не решила применить его для создания подвижного автономного микроактуатора . Устройство имело полуцилиндрическую форму с маленькой платиновой областью (рис. 2а). Как только оно помещалось в воду, смешанную с перекисью водорода, последняя начинала разлагаться под действием платины. При этом выделялись пузырьки кислорода, которые толкали микромотор вперед. Стоит заметить, что ученых не сильно интересовали параметры движения моторов — их главной целью было наблюдение за поведением таких частиц.
Сегодня известно несколько способов движения микро-/наноботов в различных средах (рис. 2). Самый распространенный из них — химический двигатель, который описан в опытах Уайтсайдса. Он использует энергию химических реакций на поверхности устройства для создания пузырьков газа или градиента концентраций, способствующего движению за счет направленной диффузии . Другой любопытный и древний тип двигателей — биологический. Он работает за счет вращения жгутиков вокруг своей оси . Еще один — физический, например, с применением магнитного поля (рис. 2) для перемещения микророботов, что очень напоминает движения бактерий с помощью жгутиков .

Рисунок 2. Механизмы работы разных микромоторов. а — Химический двигатель основан на каталитическом разложении перекиси водорода на платиновой поверхности. Это вызывает образование пузырей кислорода, двигающих микроробота (есть и другие виды реакций, о которых поговорим далее). б — Акустический мотор, работа которого вызывается ультразвуком, заставляющим микробота часто колебаться вокруг своей оси и тем самым продвигаться в определенном направлении . в — Движение за счет магнитного поля и ферромагнетика (сильно намагничивающегося вещества: никеля, кобальта или железа). г — Биологический мотор основан на вращении (у бактерий) или биении жгутиков (у сперматозоидов) за счет работы другого молекулярного двигателя — АТФ-синтазы .
рисунок автора статьи
Другая очень важная особенность всех микро-/наномоторов — способность к функционализации, то есть к изменению поверхности устройства с приобретением способности к выполнению каких-то задач. Например, на наноботе можно закрепить рецепторы или короткий ДНК фрагмент для обнаружения молекул, или связать нанобота с лекарством .
Сочетание маленького размера, управляемости, подвижности и возможности приобретения новых свойств делает их перспективным инструментом для решения многих задач. Поэтому ученые вооружаются этими технологиями для преодоления глобальных вызовов в медицине, фармакологии и экологии (рис. 3). На тему разнообразия нанороботов на «Биомолекуле» опубликован прекрасный обзор , а здесь мы поговорим исключительно об инновационных применениях этих созданий.

рисунок автора статьи
Робот летучая мышь, способная ходить
Все, что действительно нужно знать об этом роботе, так это то, что он создавался под вдохновением от летучих мышей-вампиров. И если вас этот факт не пугает, то вот еще несколько: этот робот может не только летать, но и ходить. Метод наземного передвижения называется «контролируемым падением». Имя DALER робот получил в честь своего изобретателя Людовика Далера, а также это сокращение от Deployable Air-Land Exploration Robot.
DALER обладает складывающимся скелетом, и поэтому он может складывать и расправлять крылья в зависимости от поставленной задачи и ситуации. В воздухе подвижные крылья позволяют корректировать высоту полета. На земле они складываются, и DALER может передвигаться по компактным и закрытым пространствам. В «боевом» режиме робот способен развивать в воздухе скорость до 72 километров в час. Однако скорость катастрофически падает до 6 сантиметров в секунду, когда робот находится на земле, поэтому он, скорее, становится медленным ползуном. Однако эта особенность позволяет DALER совершать посадку, обследовать объект, переориентироваться и снова взлететь.
В нынешнем виде DALER требуется помощь для взлета. Однако будущие версии этой роботизированной летучей мыши будут способны взлетать самостоятельно. На сайте Laboratory of Intelligent Systems Далер объясняет:
О каких именно миссиях идет речь, автор не указывает, но вы же понимаете, к чему это может привести.
Робот-самурай, способный разрубить пополам стручок гороха
Знакомьтесь, Motoman MH24 — индустриальная роботизированная рука, разработанная компанией Yaskawa Electric Corporation. Может, этот робот и представлен в виде всего одной руки, но отсутствие других частей тела никак не влияет на его мастерское обращение с катаной.
MH24 компания Yaskawa создала в рекламных целях — показать, что ее роботы могут быть настолько точными, что способны управляться даже с многовековым оружием самураев. Для реализации этой идеи Yaskawa обратилась к Исао Мачи, пятикратному чемпиону в искусстве шинкования различных предметов мечем. На Мачи одели костюм захвата движений и записали все его движения во время ударов, после чего «скормили» эту информацию MH24. Во время последней стадии проекта сотрудникам компании Yaskawa пришлось надеть шлемы и защитную нательную броню, чтобы ненароком робот не порубил их в капусту — так мастерски он обращался с холодным оружием.
После обучения всему тому, чему ее можно было обучить, роботизированная рука встретилась с Мачи в импровизированном поединке по разрубанию различных предметов. У MH24 не возникло никаких трудностей в нарезке фруктов и татами. Он даже мастерски располовинил горизонтально лежащий стручок гороха. Машина ни в чем не уступала Мачи и тогда, когда пришло время измельчения татами. У робота в этом плане даже было преимущество — ему не нужно было отдыхать.
Если роботам будущего понадобится палач, то у них уже имеется идеальный кандидат. Если вас это утешит, то команде Yaskawa понадобилось несколько месяцев на то, чтобы обучить MH24 всем вышеуказанным первоклассным навыкам. Беда в том, что если роботы чему-то научатся, они этого уже никогда не забудут.
Универсальный гуманоидный робот Hubo
Все роботы, о которых мы сегодня говорили, по большей части имеют лишь одну отличительную черту, которая в будущем поможет им стать настоящими убийцами. Однако их ограниченный набор навыков лучше всего подходит для выполнения только определенных задач. А что, если создать робота, способного очень хорошо выполнять любые поставленные перед ним задачи? Знакомьтесь, Hubo.
Hubo — это бипедальный робот, разработанный южнокорейской командой KAIST специально для участия в роботехническом конкурсе DARPA’s 2015 Robotics Challenge, проходившем в Помоне (Калифорния, США). Ключевая задача конкурса — показать, насколько эффективно роботы могут справляться с разным набором поставленных задач. И при этом большинство этих задач они должны выполнить в автономном режиме. Например, им было необходимо прокатиться на автомобиле, открыть несколько дверей, преодолеть полосу препятствий, повернуть кран и подняться по лестнице — это, пожалуй, самое сложно испытание для бипедальных гуманоидных роботов.
Hubo соревновался в 22 другими роботами и в конце концов победил их всех. На прохождение всех испытаний у него ушло 44 минуты и 28 секунд, что принесло его создателям 2 миллиона долларов в качестве приза.
Успеху Hubo во многом обязан своим трансформационным способностям. Робот способен ходить на двух ногах, но для более уверенного и быстрого передвижения он садится на коленки и двигается с помощью установленных на них колесах. Помимо этого, робот может вращать своим торсом, что помогает в выборе различных направлений без необходимости поворота всего робота.
Если посмотрите видео выше, то, скорее всего, оно вас не сильно впечатлит. В конце концов, Hubo довольно неуклюж и весьма долго выполняет большинство поставленных задач. Однако помните: все эти задачи до недавнего времени были невыносимо трудными для любого существовавшего на земле робота. Hubo, в свою очередь, выполнил их все, лишь изредка получая корректирующие команды от операторов-людей. И возможно, совсем скоро эти корректировки не понадобятся вовсе, как, впрочем, и сами люди.
Hexbug Warriors Hexbug Warriors: боевые наножуки-роботы
Создатели популярной игрушки Hexbug Nano с гордостью представляют венец эволюции нано-роботов игрушек — Hexbug Warriors Hexbug Warriors — это маленькие роботы, которые движутся вперед за счет вибрации корпуса. В отличие от Hexbug Nano, которые просто резвятся, Warriors настроены более агрессивно, ведь их цель — выжить в схватке с многочисленными противниками!
Они выглядят как 5-см боевые машины, оснащены элементами кинетической амуниции, датчиками ударов и уровня жизни микроробота. Машины двигаются на особых колесах по специально разработанным для них площадкам для сражений. У ребенка-обладателя жука Warriors есть возможность изменения внешнего вида своего робота и, соответственно, вариантов его амуниции. Они ведут себя как настоящие живые жуки!
Работают микророботы-наножуки от двух батареек AG13, в комплекте они имеются.
Футутристично выглядящие бойцы бывают четырех цветов, каждый из которых представляет противоборствующую академию.
Для поединков Hexbug Warriors разработаны два типа площадок — арена, которая идеально подходит для дуэлей, и большой стадион, на котором поместятся несколько микророботов.
Микроробот Нано жук ведет себя как настоящая букашка: носится по полу из угла в угол, непредсказуемо меняет траекторию движения, а в случае, если он вдруг перевернется, самостоятельно встает на ноги. Несмотря на кажущуюся примитивность насекомого, микро робот Nano способен самостоятельно обходить любые преграды и даже находить выход из лабиринта.
Наблюдая за движениями этих маленьких созданий, можно лучше понять принципы механики, робототехники и электроники. Кроме того микророботы выглядят очень стильно внешне. Последнее делает их не только игрушкой для детей, но и оригинальным сувениром для увлеченных взрослых.
Как же он движется?
Маленький вибрирующий механизм внутри микроробота заставляет жучка практически незаметно подпрыгивать. Из-за этого ножки сгибаются и распрямляются, тем самым двигая микроробота вперед.
Неважно, сколько у тебя жучков: два или двести, набор для конструирования жилищ Нано позволит создавать произвольные площадки и жилища для ваших микро-жучков
Рой микророботов
Когда у вас несколько микророботов сразу, их поведение напоминает рой настоящих насекомых — это захватывающее зрелище! С первого взгляда покажется, что они движутся хаотично, но присмотревшись, можно увидеть взаимопомощь или соперничество среди особей.
Робот Cheetah может прыгать через барьеры
Вы наверняка уже знакомы с роботом Cheetah, разрабатываемом компанией Boston Dynamics (ныне «дочка» Google). Четырехлапый железный монстр способен бежать со скоростью 45 километров в час. Если вы читали нас в мае, то вам наверняка известно, что этот робот стал еще интереснее, а точнее опаснее. «Гепард» научился перепрыгивать препятствия на своем пути.
Используя сенсорные технологии на основе лазеров, робот способен «видеть» и рассчитывать наиболее оптимальный способ преодоления препятствия. После прыжка машина приземляется на свои механические лапы и продолжает бежать как ни в чем не бывало. Стоит отметить, что это довольно удивительная способность для робота, который весит 32 килограмма. Теперь сбежать от этого четырехлапого ужаса, просто расставив препятствия на его пути, у вас не получится. Cheetah способен с «легкой грацией кошки» перепрыгивать объекты высотой до 46 сантиметров.
Далее ученые из Google собираются проверить Cheetah на открытом воздухе, чтобы посмотреть, как ведет себя робот на разных поверхностях. Правильно, чтобы научить его гнаться за вами еще и по камням.
Самовосстанавливающийся робот
Роботы — не лучшие импровизаторы. Это факт. Они создаются для выполнения определенных задач в относительно предсказуемых обстоятельствах. Даже незначительное повреждение одного из компонентов робота способно сделать из машины кусок бесполезного железа. А все потому, что в них не заложена задача к самовосстановлению или самостоятельной адаптации к среде при возникновении неисправностей. Что, если научить робота «думать шире»?
Именно с этим вопросом к делу подошел Жан Батис Моро и его научная команда из Университета Пьера и Марии Кюри. Они захотели создать робота, который смог бы менять свое поведение в ответ на появившиеся повреждения. Таким же методом, например, действуют живые существа, не создавая давление на поврежденную конечность. Ученые разработали для реализации этой идеи специальную программу. Обладающий этой программой робот знает все свои изначальные возможности в движении. Когда происходит повреждение, машина пытается найти другой и наиболее эффективный способ дальнейшего передвижения в соответствии с имеющимся повреждением. Люди, знакомые с видеоиграми и в частности с космическим хоррором «Dead Space», должно быть, помнят «метод точечной расчлененки» и дальнейшее поведение монстров после нее.
Свою программу адаптации исследователи решили проверить на шестиногом 50-сантиметровом роботе. Удивительно, но машина действительно нашла способ эффективного передвижения после различных видов повреждений. Даже после того, как две ноги робота оказались полностью нефункциональными. Помимо этого, команда робототехников проверила метод на роботизированной руке, которая продолжила выполнять поставленную перед ней задачу даже после того, как несколько соединений были сломаны 14 разными способами.
Действительно, очень интересно будет наблюдать и ждать, пока он сам себя починит и продолжит за вами охоту.
Роботы-насекомые, способные прыгать по воде
Что будет, если собрать команду из биологов, экспертов в биоробототехнике и мастеров в машиностроении? Они создадут робота-водомерку. Он способен идеально повторять поведение живых водомерок и прыгать по воде. Некоторые даже успели его сравнить с роботами-пауками из фильма «Особое мнение».
Все началось с того, что команда из Сеульского государственного университета (и одного участника из Гарварда) решила последить с помощью высокоскоростных камер за тем, как же получается у этих крошечных насекомых так резво скакать по водной поверхности без нарушения поверхностного натяжения. Оказалось, что во время прыжка водомерка ускоряется постепенно, что позволяет не создавать дополнительного давления на водную гладь. Вдохновившись этим открытием, исследователи взялись за создание робота-насекомого, способного следовать тому же принципу.
Тело получившегося миниатюрного бота размером всего 2 сантиметра. Балансирует оно на 5-сантиметровых лапках, сделанных из проводов. «Ступни» робота покрыты специальным слоем водоотталкивающего материала, что наряду с небольшим весом робота, который составляет всего 68 миллиграммов, добавляет ему устойчивости на водной поверхности и позволяет совершать с нее прыжок на высоту более 14 сантиметров. Более того, робот способен выполнять этот трюк одинаково хорошо не только на воде, но и на твердой поверхности.
Единственный минус — текущий прототип способен прыгнуть только один раз и он не приземляется обратно на свои лапки. Однако исследовательская команда планирует построить улучшенную версию робота-водомерки, которая сможет еще и плавать, а также выполнять куда более сложные задачи, по сравнению с тем, что робот умеет сейчас.
Один из авторов этот проекта, описывая нынешние и будущие возможности робота в статье журнала Science, сообщает, что одной из основных сфер применения подобных роботов может быть «военная разведка». Поэтому если вы еще не начали беспокоиться, то, пожалуй, это самое подходящее время, чтобы начать.
История
Появление микророботов стало возможным благодаря созданию микроконтроллеров в последнем десятилетии 20-го века, и разработке миниатюрных механических систем, основанных на кремнии (MEMS), хотя в конструкции многих микророботов не используется кремний для механических деталей, не считая датчиков. Первые исследования и концептуальное проектирование таких маленьких роботов были проведены в начале 1970-х в (на тот момент) засекреченных исследований для американских спецслужб.
Практическое применение предусматривало в то время освобождение военнопленных и радио-и радиотехнические разведывательные миссии. Лежащие в основе миниатюризации вспомогательные технические средства не были достаточно развиты в то время, при ранних расчетах и концепции технических требований в разработке прототипов явного прогресса не было.
Развитие беспроводных соединений, особенно Wi-Fi (то есть в домашних сетей) значительно увеличило пропускную способность микророботов, и, следовательно, их способность взаимодействовать с другими микроботами для выполнения более сложных задач. Действительно, множество последних исследований сосредоточены на связи между микроботами, в том числе групповой связи 1024 роботов в Гарвардском университете, которые могут собираться в конструкции различных форм; и производственные микророботы от компании SRI International для программы Агентства
оборонных перспективных исследовательских разработок(АОПИР) «Минипредприятие: управление перспективными исследовательскими программами в крупных масштабах», которая может создать структуру, сочетающую небольшой вес и высокую прочность.
В 2020 году были изобретены ксеноботы — микророботы, построенные из биологических тканей при полном отсутствии металла и электроники. Биоразлагаемость и биосовместимость ксеноботов, а также отсутствие в них источников электропитания, позвонилили избежать некоторые технологические и природные ограничения традиционных микророботов.
Робот-геккон, ползающий по стенам и способный унести в 100 раз больше собственного веса
Два года назад был создан робот RISE, способный карабкаться по вертикальным поверхностям. В 2015 году теперь есть роботы, которые карабкаются по вертикальным поверхностям и при этом везут на себе вес, в 100 раз превышающий их собственный. Создали крошечных роботов-скалолазов инженеры из Стэнфордского университета.
Основным источником вдохновения на их создание явились гекконы, которые используют липкие лапки для ползания по стенам. Каждая ступня робота имеет множество крошечных резиновых иголок, которые сгибаются, когда робот цепляется к стене, и разгибаются, когда он убирает лапку от поверхности. При этом робот очень прочно и уверенно держится на стене. Пока одна лапка держится за поверхность, вторая движется вперед. В результате крошечный бот весом всего в 9 граммов способен нести на себе 1 килограмм дополнительного груза. Если взять масштаб побольше, то килограммовый робот с легкостью унесет на себе среднестатистического человека.
Стэнфордские ученые также применяют этот «концепт липких лап» к наземным роботам, которым не приходится бороться с законами гравитации при восхождении на стены. Один из таких ботов, µTug, весит всего лишь чуть больше, чем настоящий геккон — 12 граммов. Однако µTug способен тащить за собой вес, в 2000 раз превышающий его собственный! Дэвид Кристерсен, один разработчиков робота, сравнивает это «с человеком, пытающемся тащить за собой синего кита».
И если вы подумали о том, собирается ли команда робототехников применить их метод для разработки более крупных роботов, то вы оказались совершенно правы.
Выводы, проблемы и перспективы
Пока мы только начинаем знакомиться с удивительными жителями наномира и их возможностями. Достижения последних десятилетий — это только первые шаги в нашем длинном нанопутешествии. Постепенно ученые пытаются создавать и «одомашнивать» микро-/наноботов, чтобы использовать их во благо человечества. Шаг за шагом эти устройства делают революцию в медицине: они выполняют микрохирургические операции с высокой точностью, проводят быструю и дешевую диагностику заболеваний на клеточном и молекулярном уровнях и эффективно доставляют лекарства в труднодоступные области организма (например, в опухоли или печень ). Также они помогают решать глобальные экологические проблемы: от мониторинга и обнаружения загрязнений до транспорта и ликвидации загрязнителей.
В будущем микро-/наномоторы будут совершенствоваться по природным принципам. Биологические наномашины, такие как рибосома или кинезины (белки, «шагающие» по микротрубочкам), имеют все характеристики идеального робота: высокая скорость, биосовместимость и способность к биоразложению после выполнения своих функций. Но, чтобы достигнуть Святого Грааля природы, нужно преодолеть трудности сегодняшнего дня. Очень малое до сих пор было придумано относительно возможностей бестопливных способов движения, а также новых видов моторов, таких как ферментативный или биогибридный. Нам также нужно больше исследований и разработок для отслеживания микро-/наноботов и повышения их управляемости внутри организма. Победа над этими проблемами откроет нам новые горизонты не только в наномедицине и экологии, но и в понимании всего нашего мира.