Крылатые субмарины: подводные истребители и авианосцы
Содержание:
- В Новом Свете
- Российский Проект «914 бис»
- Подводный вертолет
- История проекта
- Летающие субмарины США
- Жизнь как в кино
- Французский подводный авианосец «Сюркуф»
- Двигатель под колпаком
- Подводные лодки способные переносить авиацию
- И взлетим, и поплаваем!
- Дальнейшие разработки
- Самолет-аквариум
- Подводный рок 1960-х
- Пять океанов
В Новом Свете
В 1978 году Offshore Systems Engineering продала буровым подрядчикам дюжину систем WASP по цене $430 000 за штуку, сделав 30-летнего Хокса серьезной фигурой в среде промышленных водолазов. А еще через полгода, когда на рынке появился MANTIS — первая в мире одноместная микросубмарина, способная выполнять сложнейшие операции на глубине 720 м, — о нем заговорили как о гении. Гидравлические манипуляторы аппарата были настолько совершенны, что Хокс не раз выполнял с их помощью фантастический трюк — подхватывал двупалой клешней шариковую ручку и аккуратно подписывал ею банковский чек.
Субмарина, похожая на гигантского рака-богомола, мгновенно стала хитом и разошлась по миру тиражом 33 экземпляра. И даже попала в кино! В 1981 году за рычагами одного из MANTIS Хокс снялся в роли технонегодяя в 12-й серии Бондианы For Your Eyes Only с Роджером Муром.
Тогда же, в 1981-м году, он решил навсегда перебраться в Соединенные Штаты. Но причиной этого решения был не бизнес, а женщина. Сильвия Эрл, знаменитый океанолог и дайвер экстра-класса, которую называли «Кусто в юбке». «Сильвия удивила меня. Она произнесла вслух имя моей мечты: Бездна Челленждера, — улыбается Хокс.- Чтобы увидеть ее своими глазами, я был готов рискнуть всем на свете».
Но создание субмарины, способной выдержать колоссальное давление бездны, стоило огромных денег. У Хокса, оставившего все своей первой семье, за душой не было ни гроша. Поиск спонсоров, организованный Сильвией, также не принес результата. И тогда они решили заработать деньги самостоятельно. Для того чтобы начать бизнес с нуля, Сильвии пришлось заложить свой дом в Окленде. Основанная ими в 1981 году компания Deep ocean Engineering быстро стала одним из лидеров зарождающегося рынка подводных аппаратов с дистанционным управлением. Подобные машины были весьма популярны у нефтяников и газовиков, осваивавших богатые месторождения на шельфе, так как позволяли сэкономить на дорогих водолазных работах. В 1983 году на волне «нефтяного» спроса Хокс и Эрл вывели на рынок свое первое детище — робота-беспилотника Bandit ценой $750 000.
В ряду своих «собратьев» полуторатонный Bandit выделялся беспрецедентной точностью манипуляций. Его механическая «рука» длиной 2,4 м благодаря инновационной системе акустической обратной связи могла дозировать перемещения с погрешностью до 1 мм. Кроме того, Bandit стал первым в мире подводным роботом с гидравлическим контуром, в котором вместо масла использовалась забортная морская вода.
Российский Проект «914 бис»


СМИ охватила новость о том, что Россия собирается построить атомный подводный авианосец «914 бис». Каких-либо конкретных заявлений по этому поводу не было. Однако эксперты утверждают что такой гигант в наше время не актуальная тема т.к. в первую очередь это будет платформой для самолетов. Любой авианосец нуждается в защите другими подводными/надводными группами. Следовательно, потеряется изюминка подводных авианосцев – неожиданность. Если подводный авианосец будет действовать в одиночку, он может быть легко поражен. Да, можно произвести взлет самолетов, а затем обратно погрузиться под воду, но что тогда будет с самолетами? В этом случае это будут самолеты – камикадзе, что использовались только в Японии. Другими словами подводные авианосцы на данный момент являются не доработанным и очень дорогим удовольствием для любой страны мира.
Подводный вертолет
В 1984 году в портфолио компании появился первый пилотируемый аппарат — одноместный Deep Rover, способный работать на глубинах до 800 м более восьми часов подряд. По мнению опытнейшего дайвера, вице-адмирала ВМФ Британии сэра Джона Ролинса, Deep Rover стал лучшей микросубмариной всех времен и народов. И, без сомнения, самой комфортной. Внутри огромной панорамной сферы из акрила толщиной 130 мм находилось кресло пилота с кучей настроек и интуитивно понятные органы управления. Управлять Deep Rover, цена которого переваливала за $3 млн, было проще, чем легковушкой с «автоматом». К примеру, 13-летняя дочь Хокса смогла совершить погружение на глубину 300 м после пятиминутного инструктажа.
Но, несмотря на великолепные характеристики и установленный Хоксом мировой рекорд одиночного погружения (914,4 м), продажи Deep Rover шли неважно — рухнувшие котировки заставили нефтяников затянуть пояса. И Deep ocean Engineering выбросила на рынок антикризисный продукт
Это был компактный, почти игрушечный, робот-универсал Phantom ROV ценой $20 000. Спрос на него превзошел все ожидания. За три года было продано 255 экземпляров Phantom в 16 различных комплектациях. Причем 66 «малышей» были изготовлены по заказу энергетиков и до сих пор помогают контролировать состояние систем охлаждения на ядерных электростанциях США.
Когда же Хокс поставил на повестку дня вопрос о финансировании разработки сверхглубоководной субмарины «авиационного» типа, акционеры заявили, что коммерческой ценности эта идея не представляет. «На самом деле этот проект мог принести компании десятки миллионов прибыли только на лицензировании новых технологий, — говорит изобретатель. — Но этим неудачникам была нужна синица в руках».
Хокс ушел из компании и начал строить прототип DeepFlight (так он окрестил будущего покорителя бездны) на свои деньги. В отличие от классических подлодок, представлявших собой воздушный шар с балластом, DeepFlight после набора «взлетной» скорости в надводном положении мог перемещаться в любом направлении за счет гидродинамики крыльев и тяги движителей. Всплытие «летательного» аппарата могло производиться как за счет естественной плавучести («свободного падения» к поверхности), так и в активном режиме.
История проекта
В середине 1930-х годов в Советском союзе было решено приступить к созданию мощного военно-морского флота, что предусматривало строительство линкоров, авианосцев и кораблей других классов. В это время появлялись множество принципиально новых и необычных технических и тактических решений. В частности, была предложена идея создать аппарат, сочетающий свойства подводной лодки и самолета. Это был принципиально новый проект, никогда ранее не реализованный.
С 1934 по 1938 гг. проектом «Летающей подводной лодки» руководил Борис Ушаков. ЛПЛ представляла собой трёхмоторный двухпоплавковый гидросамолет, оборудованный перископом. Ещё во время обучения в Высшем морском инженерном институте имени Ф. Э. Дзержинского в Ленинграде, с 1934 года и вплоть до его окончания в 1937 году, студент Борис Ушаков работал над проектом, в котором хотел совместить возможности гидросамолёта и подводной лодки.
В 1934 году курсант ВМИУ им. Дзержинского Б.П.Ушаков представил схематичный проект «Летающей подводной лодки» (ЛПЛ), который впоследствии был переработан и представлен в нескольких вариантах для определения остойчивости и нагрузок на элементы конструкции аппарата.
В апреле 1936 года поступил отзыв капитана 1 ранга Сурина, где указывалось, что идея Ушакова интересна и заслуживает безусловной реализации. Спустя несколько месяцев, в июле, полуэскизный проект ЛПЛ рассматривался в Научно-исследовательском военном комитете (НИВК) и получил положительный отзыв, содержавший три дополнительных пункта, один из которых гласил:
| …Разработку проекта желательно продолжать, чтобы выявить реальность его осуществления путем производства соответствующих расчетов и необходимых лабораторных испытаний… |
Среди подписавших документ были начальник НИВКа военинженер 1 ранга Григайтис и начальник кафедры тактики боевых средств флагман 2 ранга профессор Гончаров.
В 1937 году тема была включена в план отдела «В» НИВКа, но после пересмотра, от темы отказались. Вся дальнейшая разработка велась самим Б.П,Ушаковым, воентехником 1 ранга, во внеслужебное время.
Летающие субмарины США
Первые проекты летающих мини-субмарин были предложены в США еще в 1945 году. Но актуальной эта задача стала позже – с началом холодной войны. Американские военные планировали использовать подводные самолеты также, как и советские – для скрытного проникновения в бассейны Балтийского, Черного и Каспийского морей и диверсионных действий там в подводном положении.
Теоретические расчеты советских конструкторов еще в конце 30-х гг. доказали невозможность создания аппарата, одинаково эффективного и в воздухе, и под водой – ведь вторая плотнее первого более почти в 800 раз.
Разработкой летающих субмарин занимался конструктор Дэвид Рэейд, которому в середине 60-х удалось создать рабочий уменьшенный прототип будущей машины. Действующий прототип самого аппарата, прозванного в научной среде трифибией, был построен и испытан в 1964 году. Поразительных результатов он не продемонстрировал: при планируемой скорости в воздухе свыше 300 км/ч была достигнута лишь планка в 100 км/ч; глубина погружения составила лишь 2 метра, а скорость в подводном состоянии – чуть более 7 км/ч.
К идее возвращались в 2006-2008 гг. Беспилотный подводный самолет Cormorant сегодня в ограниченном количестве состоит на вооружении ВМФ США.
Тем не менее американцы решили продолжить разработки и четырьмя годами позже был официально представлен воздушный корабль – «Aeroship». Но 130 км/ч в воздухе и 14,5 км/ч под водой не очень впечатлили военных. Кроме того, он также не умел взлетать после погружения, так как топливные баки после приводнения использовались в качестве балластных цистерн. Через несколько лет – с появлением новых материалов и технологий – Рэйд предложил более совершенную модель трифибии, но Правительство США к тому времени уже поставило крест на идее.
Параллельно с работами по созданию подводных самолетов в мире рассматривались и другие проекты скрытой доставки авиации, например, подводные авианосцы. Такие были у Британии и Японии, но развития они также не получили.
Если статья понравилась, ставьте палец вверх и подписывайтесь на канал. Спасибо всем, кто читает! )
Жизнь как в кино
Работа над DeepFlight шла крайне медленно. Какое-то время Хоксу помогали приятели, приходившие по уикендам к нему в гараж на пиво и гамбургеры. Потом денег перестало хватать даже на пиво. Отношения с Сильвией разладились, и она уехала в Окленд. В 1990 году они развелись. После расставания с Сильвией почти на семь лет Хокс пропал из виду. Пытался искать сокровища затонувших испанских галеонов, обучал операторов промышленных субмарин, придумал, запатентовал и выгодно продал первую в мире технологию дистанционного управления для боевого оружия Telepresent Rapid Aiming Platform (TRAP). И упорно двигался к своей главной цели.
В сентябре 1996 года в бухте Монтеррей состоялся первый «полет» его одноместной сигары DeepFlight 1, постройку которой спонсировали компании IMAX, Rolex и телеканал National Geographic. Внешне DeepFlight 1, сделанный из титана и фибергласа, напоминал гибрид батискафа и крылатой ракеты и мог погружаться на 1000 м. Но, несмотря на восторженную прессу, желающих финансировать строительство DeepFlight2 — аппарата, способного «дотянуться» до бездны, — не нашлось.
В 1997 году у Хокса появилась новая жена, а следом — новая компания Hawkes Ocean Technologies (HOT). На этот раз Грэм намеревался строить скоростные аэросубмарины для скучающих миллионеров, но денежные мешки не спешили выстраиваться в очередь у его кассы. Поэтому на первых порах супругам пришлось подрабатывать в кино. Дебютным продуктом семейного предприятия стала одноместная аэросубмарина «мокрого» типа WetFlight — подводный крылатый кабриолет с открытой кабиной, построенный в 1998 году по заказу киношников из IMAX для съемок фильма о дельфинах. В нескольких документальных картинах Хокс пилотировал свои старые аппараты Deep Rover и MANTIS.
Только через пару лет у HOT появились деньги на реализацию первого серьезного проекта, и в 2000 году Хокс спустил на воду экспериментальный аппарат с плоским фюзеляжем и короткими крыльями «перевернутого» профиля под названием DeepFlight Aviator.
Машина оказалась очень удачной сточки зрения гидродинамики. Достаточно сказать, что на глубине 300 м Хоксу удавалось «крутить» на Aviator фигуры высшего пилотажа. Последующие «спортивные» модели HOT с постоянной положительной плавучестью, включая двухместный Super Falcon и трехместный Merlin, стали эволюционным развитием этой схемы.
Французский подводный авианосец «Сюркуф»
После устрашающих последствий Первой Мировой было решено снизить и ограничить количество военной техники. В корабельном плане был подписан «Лондонский» договор, по которому были приняты ограничения в водоизмещение, оружие и их количестве. Страны стали искать лазейки для обхода принятого соглашения. В связи с тем, что договор в основном концентрировался на надводной технике, страны решили воспользоваться подводной техникой. Франция была одной из таких стран. Франция сделала свой акцент на мощные подводные лодки в 1927-м году.
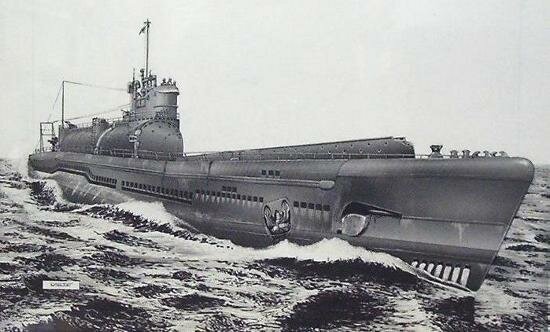
 Подводный авианосец «Сюркуф»
Подводный авианосец «Сюркуф»
Подводные крейсера начали строиться в том же 1927-ом году в количестве 3-х единиц. Однако из-за ужесточенных пунктов нового «Лондоского» договора, по которому калибр артиллерии субмарин не должен был превышать 155мм, в 1929-ом достроился только 1 подводный крейсер, который имел калибр артиллерийского орудия 203 мм («Сюркуф» был исключением для Франции по договору). В эскплуатацию ВМФ Франции вошел в 1932-ом году.
«Сюркуф» стал величием ВМС Франции. Он был огромен, имел водоизмещение в 4 300 тонн. Благодаря своему артиллерийскому орудию мог поражать любые надводные цели; 20 торпед позволяли поражать подводные цели; а также гидросамолет – разведчик «Бессон БМ410» давал возможность видеть на много дальше своих возможностей. «Сюркуф» неоднократно посещал порты других стран для показа мощи ВМФ Франции.
С быстрой капитуляцией Франции во Второй Мировой, подводный – крейсер вместе с остальными кораблями французского флота попал в руки англичан, а затем был перенаправлен в США. Из-за своих нескончаемых неисправностей, субмарина переходила с одного порта в другой. В одном из таких переходов в Таити из порта в Бермудах, «Сюркуф» пропал без вести в водах Карибского моря. По официальным данным подводная лодка потонула из-за своих неисправностей, однако французские историки до сих пор ведут расследование по данной теме.
Двигатель под колпаком
Аналогичный ушаковскому проект в США появился многими годами позже. Как и в СССР, его автором стал энтузиаст, работы которого считали безумными и нереализуемыми. Фанатичный конструктор и изобретатель, инженер-электронщик Дональд Рейд занимался разработкой субмарин и созданием их моделей с 1954 года. В какой-то момент ему пришла в голову мысль построить первую в мире летающую подводную лодку.
Рейд собрал целый ряд моделей летающих субмарин, а когда убедился в их работоспособности, приступил к сборке полноценного аппарата. Для этого он использовал в основном детали от списанной авиационной техники. Первый экземпляр самолета-подлодки Reid RFS-1 Рейд собрал к 1961 году. Аппарат был зарегистрирован как самолет под номером N1740 и приводился в движение 65-сильным 4-цилиндровым авиамотором Lycoming. В 1962 году пилотируемый сыном Дональда Брюсом самолет RFS-1 пролетел 23 м над поверхностью реки Шрусбери в штате Нью-Джерси. Опыты по погружению провести не удалось: сказались серьезные недоработки конструкции.
Для превращения самолета в субмарину пилот должен был убрать пропеллер и закрыть двигатель резиновым колпаком, работающим по принципу водолазного колокола. В хвосте располагался электродвигатель мощностью в 1 л.с. (для перемещения под водой). Кабина не была герметичной — пилот вынужден был использовать акваланг.
О проекте Рейда написал ряд научно-популярных журналов, и в 1964 году им заинтересовался ВМФ США. В том же году был построен второй экземпляр лодки — Commander-2 (первый получил «военное» наименование Commander-1). 9 июля 1964 года самолет достиг скорости в 100 км/ч и выполнил первое погружение. В первой модели самолета при погружении остатки топлива из баков откачивались в водоем, а в баки закачивалась вода для утяжеления конструкции. Таким образом, повторно взлететь RFS-1 уже не мог. Вторая модификация должна была лишиться этого недостатка, но до этого дело не дошло, так как пришлось бы перерабатывать всю конструкцию. Ведь топливные баки использовались также в качестве баков для погружения.
Однако конструкция оказалась слишком маломощной и легкой, чтобы применяться в военных целях. Вскоре руководство ВМФ охладело к проекту и свернуло финансирование. До самой смерти в 1991 году Рейд пытался «продвинуть» свой проект, но успеха так и не добился.
В 2004 году его сын Брюс написал и издал книгу «Летающая субмарина: история изобретения летающей субмарины Рейда RFS-1». Сам самолет RFS-1 хранится в музее авиации в Пенсильвании.
Однако некоторые источники утверждают, что проект Рейда получил развитие. ВМФ США приняло решение построить «Воздушный корабль» (Aeroship) — двухфюзеляжный самолет, способный погружаться под воду. Якобы в 1968 году на Всемирной промышленной выставке этот самолет совершил эффектную посадку на воду, а затем погружение и всплытие. Тем не менее официальная программа выставки того года (проводившейся в Сан-Антонио) не включала в себя демонстрацию самолета-подлодки. Дальнейшие следы этой конструкции теряются под грифом «секретно».
Подводные лодки способные переносить авиацию
Подводные авианосцы – это специальные боевые судна предназначенные для подводного перебазирования авиационных сил в другие точки земного шара для разведывательных и атакующих операций. Проектирование этого вида кораблей началось чуть больше века назад. В наши дни строительство или использование таких кораблей не является актуальным. Однако кто знает куда приведет нас наша фантазия и технологический прогресс. Поэтому нельзя исключать такого поворота событий, что морские державы вновь примутся за проект подводной лодки авианосца.
История создания
Конец девятнадцатого и начало двадцатых веков были явным прыжком в военно – морских технологиях. Интеграция надводного флота с авиацией не остановилась на достигнутом. Многие державы того времени захотели объединить авиацию с подводным флотом, в итоге появились первые подводные лодки с возможностью перевозить на своем борту самолеты. Правда эти «самолеты» не являлись теми самолетами, которые мы видим в наши дни. Сначала это были гидропланы, затем с улучшением технологий перевоплощались в змеи-автожиры, гидросамолеты и самолеты.
Подводная лодка U-12
Первые аналоги подводных авианосцев появились в первой четверти прошлого столетия в Имперской Германии. В предвоенном времени немцы искали рычаги превосходство в войне, которая вот-вот должна была начаться
Одержимый расширить границы своей империи, Вильгем II уделял особое внимание военно-морским силам т.к. наличие Великобритании в рядах противника могла привести к плачевным результатам если ничего не предпринимать в этом аспекте
Таким образом в 1915-ом году был произведен первый запуск гидроплана, перевозимый подводной лодкой для разведки Великобританских берегов. Однако субмарина могла перевозить гидроплан только в надводным положение, что заставило инженеров построить специальный ангар для авиатехники. В итоге в 1917-ом субмарине U-12 был достроен ангар. Первой авиатехникой взятый в ангар был гидросамолет-разведчик «Брандэнбург» класса «FF-29». Однако в связи с поражением и жесткими условиями Версальского соглашения, Германия забросила этот проект.
Подводные авианосцы между «I»-«II» Мировыми
После Первой Мировой войны идеей «подводных авианосцев» заинтересовался ряд стран: Великобритания, Франция, Соединенные Штаты, Советский Союз, Фашисткая Германия и Имперская Япония. Америка вновь погрузилась в доктрину «Монро», вследствие чего, не стала уделять особых усилий в развитие этой темы (дальше испытаний на субмарине «S-1» тема не продвинулась). В недавно образовавшемся СССР первый проект «субмарины-авианосца» был предложен только в 1935-м году. Проект С.Базилевского включал в себя подводные крейсера, линкоры и авианосцы, которые могли перевозить от 1 до 16 единиц разведчиков, истребителей и бомбардировщиков. Однако командование Военно-Морской Академии РККА забраковало проект в связи с тем, что он не имел экономического, тактического и военного обоснования.
Остальные из перечисленных стран были более настойчивы в этом вопросе, вследствие чего добились результатов. Особенно в идеи «подводных авианосцев» была успешна Имперская Япония.
И взлетим, и поплаваем!
Есть такой старый детский стишок, передразнивающий «правдивые» реляции информационных сводок: «Подводная лодка в степях Украины погибла в неравном воздушном бою». Безвестный автор этого перла, очевидно, и не подозревал, насколько описанная им ситуация может быть близка к правде.
На самом деле военные втихаря давно уже мечтают о том, чтобы научить подводные лодки летать или, на худой конец, самолеты нырять. Если бы такой гибрид был создан, он даже и в наши дни доставил бы противнику массу проблем, несмотря на современные системы обнаружения и уничтожения всего плавающего и летающего. Что уж тут говорить о предвоенных 30-х годах!
Только представь: аппарат тихо подкрадывается под водой к защищенной минными полями и заграждениями акватории вражеского порта, ночью всплывает и перелетает через все эти препятствия! Дальше остается только выбирать цели и расстреливать их торпедами, как на полигоне. И потом не надо дожидаться под водой серии противолодочных бомб с поднятых по боевой тревоге кораблей охранения, а можно спокойно взлететь и смыться от всей этой суеты.
Или вот еще сценарий. Подводная лодка на боевом дежурстве в заданном квадрате. Экипаж обычной субмарины получает информацию о внешнем мире только от гидроакустика или через оптику перископа. А далеко ли увидишь на море с высоты подъема этого самого перископа? Даже если лодка в надводном положении, все равно высота наблюдения составит метра три от поверхности воды, а это обзор километров на восемь вокруг, не больше.
Допустим, обнаружили, несмотря ни на что, конвой противника, так ведь надо еще успеть выйти на позицию для торпедной атаки, а скорость у субмарины времен Второй мировой в любом случае ниже, чем у надводного корабля. Даже если командир точно определит точку встречи и рассчитает упреждение, атаковать можно будет только один раз: догнать конвой для второй атаки уже не получится. Из-за всех этих проблем в военные годы безнаказанно уходили в среднем четыре цели из каждых пяти, обнаруженных подводными лодками. Отсюда и немецкая тактика «волчьих стай» адмирала Деница: у группы подводных лодок, атаковавших конвой с разных направлений, шансов добиться успеха было больше, чем у одинокой субмарины.
А вот для летающей подводной лодки ситуация упрощается в разы. Такой аппарат мог бы находиться в заданном квадрате, не тратя горючее, но время от времени взлетать для обнаружения судов противника. Даже с высоты 120 метров над водой горизонт уже до 40 километров отодвигается, а вот для вражеских наблюдателей на таком удалении летящий объект небольших размеров остается невидимым. Обнаружив конвой, командир летающей лодки определил бы его ордер и параметры движения и, рассчитав точку встречи, незаметно нырнул бы, заблаговременно заняв позицию для неожиданной торпедной атаки. Не удалось попасть с первого раза? Не беда! Взлетаем, догоняем и пускаем торпеду еще раз.
Одним словом, перспективы применения такого оружия выглядели так соблазнительно, что неожиданные контуры взлетающих подводных лодок и погружающихся под воду самолетов время от времени появлялись на кульманах конструкторских бюро многих стран. Но, к великому сожалению теоретиков от тактики и стратегии, технически создать такого рода аппарат очень сложно.
Вода и воздух — настолько разные по своим свойствам среды, что заставить, например, корпус выдерживать высокое давление на глубине и при этом быть достаточно легким для воздушного путешествия кажется совершенно невозможным. Тем не менее всегда находились люди, склонные идти к цели, не замечая препятствий.
Дальнейшие разработки
Летающая подводная лодка всегда разрабатывалась на основе гидроплана, что в конце концов приводило к неудаче. Так же заканчивались все разработки таких двусредных транспортных средств как, например, экраноплан или летающий автомобиль. И только в разработке амфибий был достигнут несомненный успех — внедрение в серийное производство.
Другим подходом к проектированию выделяется подводный самолёт. В нём было применено иное решение, совершенно не оправдывающее своё название: разрабатывалась именно подводная лодка, которая «летает» в воде. Поскольку в таком решении совершенно не нужны балластные цистерны, лодка значительно легче вытесняемого ею объёма воды и потому неподвижная лодка стремится к всплытию. Крылья такой лодки создают эффект, обратный подъёмной силе — «утопляющую силу», но только тогда, когда лодка находится в движении. Таким образом, недостатком подобного технического решения является то, что лодка медленно погружается и только на небольшие глубины.
Самолет-аквариум
Самолет-подлодка постепенно приобрел окончательные внешний вид и «начинку». Внешне аппарат гораздо больше напоминал самолет, чем субмарину. Цельнометаллическая машина весом в 15 т с экипажем из трех человек теоретически должна была развивать скорость до 200 км/ч и иметь дальность полета в 800 км. Скорость под водой — 3−4 узла, глубина погружения — 45 м, дальность «заплыва» — 5−6 км. В движение самолет должен был приводиться тремя 1000-сильными моторами АМ-34 конструкции Александра Микулина. Нагнетатели позволяли двигателям осуществлять кратковременное форсирование с увеличением мощности до 1200 л.с.
Оружие
В России создали оружие против стай дронов
Стоит отметить, что на тот момент АМ-34 были наиболее перспективными авиационными двигателями производства СССР. Конструкция 12-цилиндрового поршневого силового агрегата во многом предвосхитила разработки авиационных двигателей известных фирм «Роллс-Ройс», «Даймлер-Бенц» и «Паккард» — лишь техническая «закрытость» СССР мешала Микулину обрести всемирную славу.
Внутри самолет имел шесть герметичных отсеков: три для двигателей, один жилой, один для аккумуляторной батареи и один — для гребного электродвигателя мощностью 10 л.с. Жилой отсек не являлся кабиной пилота, а использовался только для подводного плавания. Кабину пилота во время погружения затапливало, как и еще целый ряд негерметичных отсеков. Это позволяло сделать часть фюзеляжа из легких материалов, не рассчитанных на высокое давление. Крылья полностью заполнялись водой самотеком через шпигаты на закрылках — для выравнивания внутреннего и наружного давления.
Системы подачи топлива и масла отключались незадолго до полного погружения. При этом трубопроводы герметизировались. Самолет покрывался антикоррозийными покрытиями (лаком и краской). Погружение происходило в четыре этапа: сначала задраивались отсеки двигателей, потом отсеки радиатора и аккумуляторной батареи, затем управление переключалось на подводное, наконец, экипаж переходил в герметичный отсек. Самолет был вооружен двумя 18-дюймовыми торпедами и двумя пулеметами.
10 января 1938 года проект был повторно рассмотрен вторым отделом НИВК. Тем не менее все понимали, что проект «сырой» и на его реализацию уйдут огромные средства, а итог может быть нулевым. Годы были весьма опасными, шли массовые репрессии, и попасть под горячую руку можно было даже за нечаянно оброненное слово или «неправильную» фамилию. Комитет выдвинул ряд серьезных замечаний, выразив сомнение в способности самолета Ушакова подняться в небо, догнать уходящий корабль под водой и т. д. Для отвода глаз было предложено изготовить модель и провести ее испытания в бассейне. Больше никаких упоминаний о советском самолете-подлодке нет. Ушаков долгие годы работал в кораблестроении над экранопланами и кораблями на воздушных крыльях. А от летающей лодки остались только схемы и рисунки.
Подводный рок 1960-х
В апреле 1945 года на горизонте неожиданно появился человек по имени Хьюстон Харрингтон, подавший заявку на патент «Совмещение самолета и подводной лодки». Патент был получен 25 декабря, но дальше дело не пошло. Субмарина Харрингтона выглядела очень красиво, но ни о ее полетных данных, ни о подводных качествах ничего не известно. Впоследствии Харрингтон прославился в США как владелец звукозаписывающего лейбла Atomic-H.
Другой патент на подобную конструкцию был получен в США в 1956 году. Ее создал американец Дональд Дулитл (совместно с Рейдом). Эта конструкция отталкивалась скорее не от самолета, а от субмарины. Движение под водой традиционно обеспечивалось электромотором, зато полет осуществлялся при помощи двух реактивных двигателей.
В 1964 году фирма Conveir предложила ВВС США разработку небольшого самолета-субмарины. Были представлены документы — чертежи, схемы и даже несколько фантастических «фотографий». Conveir получил от Бюро военно-морских вооружений техническое задание, которое включало скорость 280−420 км/ч, глубину погружения 460 м, дальность полета 555−955 км и т. д. Несмотря на явно завышенные требования, контракт был заключен.
В проекте была реализована идея Рейда об использовании топливных баков в качестве емкостей для погружения, но топливо не сливалось, а поступало в другие специальные баки — для лучшего распределения нагрузки под водой. Жилой отсек и отсек двигателя герметизировались, остальные части подлодки заполнялись водой. При изготовлении субмарины планировалось использовать сверхлегкие и сверхпрочные материалы, в том числе титан. Команда состояла из двух человек. Было изготовлено несколько моделей, которые прошли успешные испытания.
Развязка пришла неожиданно: в 1966 году известный сенатор Аллен Элендер, глава Комитета сената по вооружениям, откровенно высмеял проект и отдал распоряжение прекратить разработку. Полноразмерный образец так и не был изготовлен.
Пять океанов
Мечта умерла, но Хоксу было некогда предаваться печалям. В 2008 году прознавший о задумке Фоссетта венчурный инвестор Том Перкинс заказал Hawkes Ocean Technologies «облегченную» версию Challenger. Перкинс не собирался штурмовать Марианскую впадину. Аэросубмарина была нужна ему исключительно для подводных экскурсий в приятной компании. По словам Хокса, двухместный DeepFlight Super Falcon обошелся заказчику в $1,5 млн и представлял собой настоящий Ferrari на «подводных крыльях».
Двухтонный аппарат длиной 6,2 м с системой управления fly-by-wire, литий-фосфатными батареями и кормовым водометным движителем с тягой 0,23 т ускорялся до 10 км/ч и обеспечивал экипажу суточное автономное плавание. Оригинальная система навигации позволяла фиксировать траекторию маршрута, и Super Falcon мог возвращаться в исходную точку на автопилоте. Сверхпрочный композитный корпус из стеклопластика и карбона и прозрачные акриловые полусферы могли выдержать спуск на 1500 м, но уже на отметке 500 м винт водомета принудительно отключался электроникой. После этого Super Falcon поднимался в «разрешенный» подводный коридор за счет положительной плавучести. Экстренное всплытие обеспечивали три пиротехнические подушки безопасности, создававшие вертикальную тягу в 0,8 т, и активировать их можно было даже дистанционно.
Тем временем идея одиночного покорения Бездны Челленджера завладела умами многих. В 2009 году осиротевший Challenger был выкуплен известным яхтсменом и предпринимателем Крисом Уэлшем за $2 млн. В 2011 году на паях с британским миллиардером Ричардом Брэнсоном Уэлш основал компанию Virgin Oceaniс, целью которой стало осуществление серии погружений в глубочайшие точки каждого из пяти океанов планеты. Одновременно с Virgin Oceaniс планы погружения в Марианскую впадину обнародовали знаменитый режиссер Джеймс Кэмерон, компания Triton Submarines из Флориды, а также тандем, в который вошли экс-супруга Хокса Сильвия Эрл и глава совета директоров Google Эрик Шмидт.
Как известно, в этой технологической гонке победил Кэмерон на батискафе Deepsea Challenger, хотя поначалу эксперты считали фаворитами Брэнсона и Уэлша. Хокс, который в проекте Virgin Oceaniс выполнял роль технического консультанта, объясняет отставание нынешних владельцев DeepFlight Challenger недостаточным уровнем безопасности аэросубмарины. «После того как Фоссетт настоял на внесении изменений в исходную конфигурацию субмарины, я не уверен в том, что она выдержит повторные погружения. Воздействие колоссального давления неизбежно приведет к появлению огромного количества микродефектов уже после первого спуска. И любой из них впоследствии может стать роковым», — комментирует ситуацию Хокс.
Впрочем, знакомство с Брэнсоном не прошло для Hawkes Ocean Technologies даром. Сразу после возобновления работы над рекордной субмариной миллиардер заказал Хоксу трехместный прогулочный аппарат «мокрого» типа для развлечения гостей на своем частном острове Неккер, который находится в Карибском море. Крылатая Necker Nymph из алюминия, нержавеющей стали и карбона стоимостью $670 000 стала первой машиной нового «гидробатического» класса DeepFlight Merlin (гидробатика — подводный аналог аэробатики). Специально для Merlin инженерами HOT была разработана продвинутая авионика FAN-C, которая автоматически удерживает аппарат в заданном вертикальном диапазоне от 0 до 40 м и позволяет выполнять скоростные маневры даже новичкам. Каждое посадочное место оснащается системами подогрева сидений и дыхательной аппаратурой. Ну и наконец, машины класса DeepFlight Merlin имеют положительную плавучесть, а значит, абсолютно непотопляемы.
Грэм Хокс больше не собирается в гости к бездне. По крайней мере, лично. Но и «завязывать» с изобретательством не планирует тоже.
Статья «В бездну на крыльях» опубликована в журнале «Популярная механика»
(№10, Октябрь 2012).