Поделка робот своими руками
Содержание:
- Схема
- Что мне потребуется?
- Пропеллеролет: конвертоплан для мониторинга протяженных объектов
- Практическая часть
- Мобильный робот
- Платы
- Мир без пчел: роботизированное опыление мыльными пузырями
- Робот из консервных банок
- Механика: двигатели, шестеренки, колеса
- Робот из картонных коробок
- ILUШA vs Dynamixel. Выбор сервопривода с обратной связью
- Бесплатные онлайн-курсы по Automotive, Aerospace, робототехнике и инженерии (50+)
- Робот из пластиковых бутылок
- Питание: драйвер двигателя, батарея
- Материалы
- Основной строительный материал
- Разработка hardware-продуктов — что и как устроено
- Под капотом Tesla Model 3: как поменялось hardware за 3 года
- Издатель/подписчик для распределённых отказоустойчивых бортовых систем реального времени в 1500 строк кода
- Конъюнктура
- Выбор компонентов
Схема
Для рисования схемы и макета я использую бесплатную версию Eagle CAD. Я создал пользовательские условные обозначения и площадки для монтажа для всех элементов, кроме платы Teensy, доступной для скачивания во второй части из данной серии статей. У Teensy есть библиотеки для Eagle. Вы можете заметить, что на схеме отсутствуют какие-либо простые устройства, такие как резисторы и конденсаторы. Это связано с тем, что каждая из этих плат является уже готовой платой с выводами, чтобы сделать сборку максимально простой. Любой современный чип, скорее всего, будет для поверхностного монтажа, что для любителя может вызвать затруднения. Схемы для каждой из этих плат доступны у соответствующих продавцов. Вот несколько ключевых моментов к этой схеме:
- Я поместил перемычку между батареей и остальной частью схемы. Это полезно для отключения питания без снятия батарей, измерения тока или защиты с помощью диода от обратной полярности.
- Все интерфейсы являются цифровыми, за исключением двух. Существует UART соединение между nRF51 и Teensy через выводы 9/10. Контроллер двигателя работает через ШИМ, который поступает через выводы 6 и 4 Teensy.
- На схеме нет светодиода. Светодиод, который находится на Teensy, может использоваться для отладки или индикации.
- Здесь нет кнопки. Я подумал о том, чтобы поставить кнопку на линию сброса Teensy, но решил сэкономить.
- При программировании Teensy через USB вы должны либо разрывать небольшую дорожку, соединяющую Vin/Vusb, либо убедиться, что, когда подключен USB, батареи отключены.
 Схема печатной платы робота
Схема печатной платы робота
Что мне потребуется?
В первую очередь — микроконтроллер. Он станет мозгом будущего робота. Можно сказать, что микроконтроллер — это крошечный компьютер, размещенный на одной микросхеме. У него есть процессор, оперативная и постоянная память и даже периферийные устройства: интерфейсы ввода и вывода данных, различные таймеры, передатчики, приспособления, которые инициируют работу двигателей. Набор устройств зависит от конкретной модели. Именно микроконтроллер будет получать информацию от внешнего мира через датчики движения, фотокамеры и прочие приспособления, анализировать ее и побуждать робота совершать в ответ какие-то действия.
Микроконтроллер нужно будет установить на печатную плату, запитать его, подсоединить все необходимые устройства (датчики, лампочки, двигатели), а еще собрать из подручных материалов корпус робота. Все детали, которые для этого нужны, можно купить в любом магазине радиотехники.
Пропеллеролет: конвертоплан для мониторинга протяженных объектов
Из песочницы
Однажды в институте зав кафедры рассказывал нам о нашей будущей профессии:
“Наша профессия очень важна и ответственна. Сейчас вы работаете над обликом будущего флагмана Российской авиации. Вы сыпете идеями, пытаетесь предугадать задачи, которые он будет решать, берете на себя ответственность и принимаете решения. А через 15 лет, когда самолет наконец построят, всем будут раздавать почести, но про вас уже никто не вспомнит”.
Такая агитация мне не понравилась, ждать 15 лет результата я не готов.
Авиация — высокоразвитая отрасль, но высокие требования по надежности и распланированное будущее не позволяют внедрять новые технологии быстро. А беспилотникам же наоборот, никаких особых требований пока нет, вот они и растут как грибы после дождя, заполняя собой ниши авиа мониторинга, рекламы, помощи сельскому хозяйству, видеосъемки и подобные.
Так я и решил, пускай они там как-нибудь без меня строят свои истребители, а я, пока молод и горяч, пойду в беспилотники. Благо что авиамодельное прошлое имеется.
Практическая часть
- Большинство из вас хочет создать робота не только для обучения и получения знаний, но и для чистого удовольствия. Хотя у многих есть свои конкретные идеи или проекты, которые можно материализовать.
- Последний важный момент — это бюджет. Трудно точно понять, что люди имеют хотят, когда они строят своих первых роботов. Может быть они хотят построить автономного робота для очистки снега, в то время как кто-то просто хочет сделать умные часы. Простой программируемый мобильный робот может стоить около $100. В то время как более сложные могут быть несколько тысяч долларов.
В данном цикле статей будет сделана мобильная платформа для того, чтобы понять, что такое моторы, датчики, микроконтроллеры и программирование. Мы будем использовать для создания мобильной платформы образовательный набор Lego Mindstorms EV3.
Профессия — Робототехник
Предыдущая запись Что такое робот?
Следующая запись Шаг 2. Платформа для робота
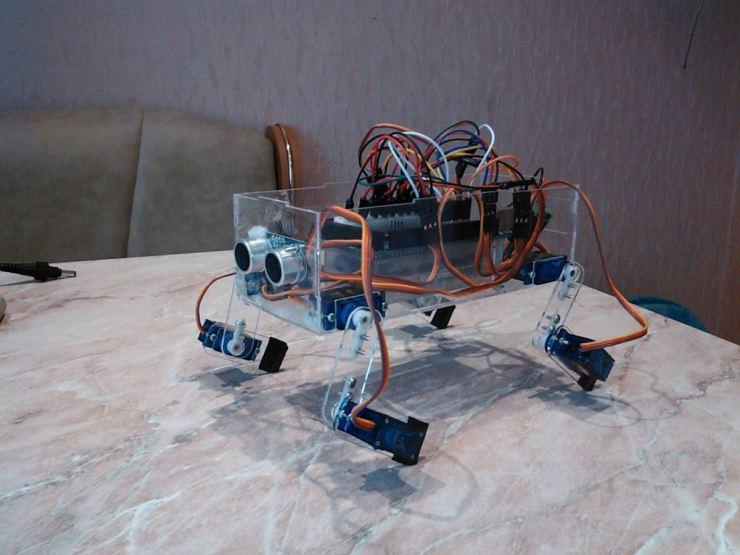
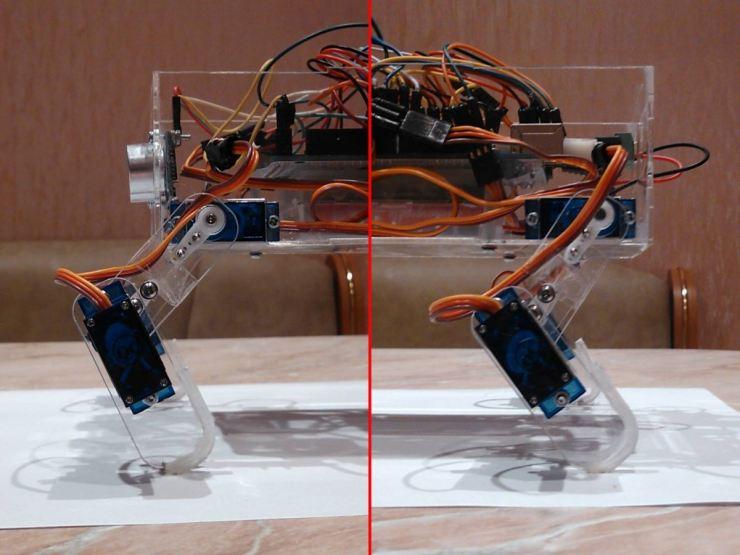
Мобильный робот
Теперь рассмотрим, как сделать робота в домашних условиях своими руками так, чтобы он отвечал последнему слову техники. Подготовьте:
- провод – 2 шт.;
- моторчик – 1 шт.;
- батарейку AA;
- канцелярские кнопки – 3 шт.;
- пенокартон – 2 куска;
- головные части старых зубных щёток – 3 шт.

Порядок действий:
- Присоедините батарейку к мотору. В качестве промежуточного слоя между ними вставьте кусок пенокартона. Фиксацию проводите при помощи клея.
- Займитесь устройством дестабилизатора. С этой целью наденьте на ось моторчика небольшой кусок пенокартона вытянутой формы и закрепите его на клей. На кончик дестабилизатора приклейте какое-либо украшение. Так вы увеличите амплитуду его движения.
- Снабдите андроида конечностями. Для этого приклейте головки от зубных щёток к нижней стороне моторчика. Роль прослойки отдайте пенокартону.
- Припаяйте отрезки провода к контактам мотора.
- Конец одного из проводов приклейте к одному из концов батарейки.
- Возьмите две бусины и прикрепите их к торцу батарейки. Это будут глаза.
- Запустите робота. Для этого свободный конец провода подсоедините к свободному контакту батарейки и зафиксируйте скотчем. Создание андроида завершено.

Вот мы и рассмотрели самые популярные способы, как сделать робота ребенку своими руками.





Важно лишь, чтобы было желание и немного свободного времени. Не бойтесь фантазировать и вносить что-то новое в готовые модели
Помните, оригинальность ценится всегда и всеми.
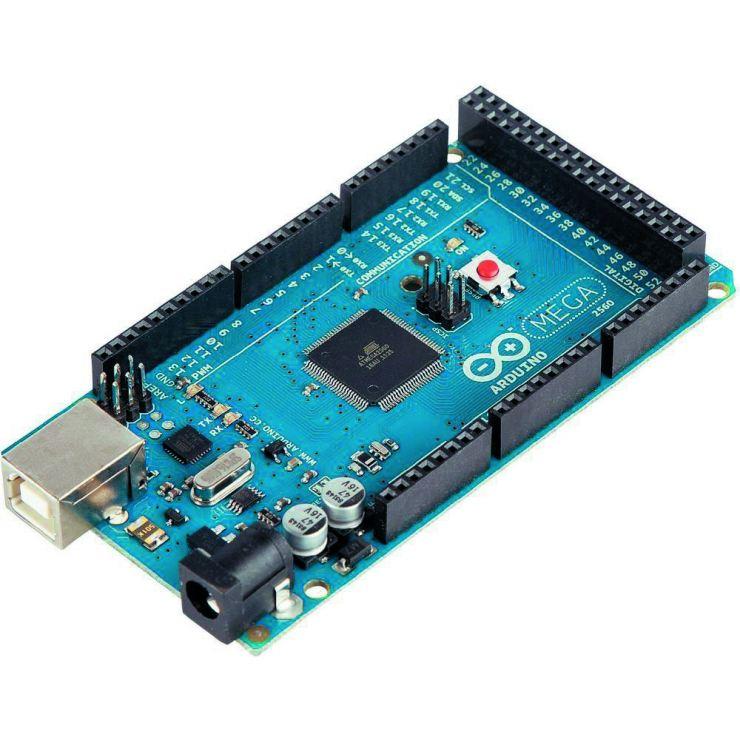
Платы
Часто в качестве основной платы выбирают «Arduino». Они простые в монтаже, достаточно мощные и надёжные. Но железо не ограничивается только одной платой, и для функционирования робота требуются драйверы двигателя, микросхемы, транзисторы — в общем, много сложных деталей.
Для твоего первого робота мы рекомендуем набор «Ардуино ДВ», ссылка на который будет ниже. В этом наборе очень много деталей, которые позволяют создать робота, не задумываясь о том, что тебе ещё нужно докупить для его нормального функционирования. В комплекте идет плата «Ардуино» UNO R3, макетная плата МВ-102, реле, датчики наклона, огня, температуры, влажности и уровня воды, шаговый двигатель, драйвер шагового двигателя, резисторы от 220 Ом до 10 кОм, светодиоды, тактовые кнопки, зуммеры, фоторезисторы, индикаторы, серводвигатель, ИК-приёмник, ИК-пульт, джойстик, LED матрица, LCD экран и другие детали. В наборе доступно 33 урока по сборке робота.
Кстати, покупать такие наборы удобнее, чем заказывать отдельные детали. Во-первых, в комплекте есть всё необходимое. Во-вторых, цена на 40% ниже, чем если бы ты покупал детали по отдельности. И в-третьих, проверенные детали. К комплекту «Ардуино ДВ» можно докупить дополнительные модули и датчики, сделав робота более функциональным. Лучший выбор для новичка.
Мир без пчел: роботизированное опыление мыльными пузырями
Школьный курс биологии научил нас тому, что все живые организмы так или иначе связаны друг с другом. Посудите сами, на поле растет трава, зайцы едят траву, лисы едят зайцев. Но если одно из звеньев этой демонстрационной цепи исчезнет, то пострадают другие: исчезнут хищники — зайцы начнут плодиться и съедят всю траву; исчезнет трава — зайцам нечего будет есть, следовательно, лисы также будут голодать; исчезнут зайцы — трава будет расти бесконтрольно, а лисы будут голодать. Пример достаточно утрирован, но суть доносит. Подобная ситуация касается и пчел, численность которых за последние годы катастрофически упала. Пчелы, как мы знаем, не только делают мед, но и выполняют одну из важнейших операций в природе — опыление. Сегодня мы рассмотрим исследование, в котором ученые Си Ян и Эйдзиро Мияко описывают роботизированную систему опыления цветов посредством мыльных пузырей. Из чего состоит система, как именно она работает, и почему мыльные пузыри? Об этом мы узнаем из доклада ученых. Поехали.
Робот из консервных банок
Красивый робот получается из консервных банок. Нужно вставить одну банку в другую. Руки и ноги сделать из металлических крышечек, которыми закрываются стеклянные поллитровые бутылки с напитками. Просверлив в центре каждой крышечки отверстие, их нужно стянуть между собой на проволоку, закрепив концы. Спереди на корпус робота прикрутить болтами две такие же крышечки.
На верхней банке вырезать отверстие – рот, прикрутить два болта – глаза. А уши сделать из кругов из фольги, закрепив их по бокам так, чтобы они торчали в разные стороны.
Не забудьте сделать фото вашей работы поэтапно и выложите на свою страничку в соцсеть. Пусть посетители позавидуют вашим умениям, а, может, даже переймут неординарный опыт.
https://youtube.com/watch?v=MZsCP3sr8KE
Механика: двигатели, шестеренки, колеса
Я нашел пару веб-сайтов, которые предлагают различные двигатели и компоненты для роботов, но я остановился на Polulu из-за их цен и наличия всего необходимого. Продукты Tamiya выглядели неплохо. Комплект 70168 Double Gearbox Kit поставляется с шестеренками, двигателями и валами, что значительно упрощает механику. И он очень дешев! В нормальном режиме двигатели работают от 3В, но могут работать и от большего напряжения за счет сокращения срока службы. Поддерживается несколько передаточных чисел, поэтому я могу точно настроить скорость робота. Я остановился на самых дешевых колесах, которые подойдут к валу из этого комплекта, Tamiya 70101 Truck Tire Set. Этот комплект поставляется с четырьмя колесами, а мне нужны только два, но он стоит дешево, а запасные части лишними никогда не будут! Переднее колесо – это просто шаровая опора или пластиковый винт, чтобы робот мог скольких по полу.
 Мозг робота: Teensy
Мозг робота: Teensy
Робот из картонных коробок
Если не выбрасывать картонные коробки, а собрать их в достаточном количестве, то можно подбросить ребенку идею сделать чудного робота своими руками. Для работы приготовьте такие материалы:
- три коробки из картона разных размеров;
- фигурную упаковку от какой-нибудь запчасти;
- две круглые формы для кексов из фольги;
- синельную проволоку;
- два картонных рулона от пищевой фольги;
- две основы от новогодней хлопушки;
- две бобины от скотча;
- два CD-диска.
Приступаем к сборке нового изделия. Прежде всего, коробки следует вывернуть наизнанку, чтобы убрать с глаз долой различные надписи. Можете не выворачивать, но тогда придется обклеить коробки цветной бумагой или фольгой. Самую маленькую коробку – голову – соединяем с самой большой – туловищем при помощи бобины от скотча – шеи. Можно воспользоваться клеем, а можно работать двусторонним скотчем.
Теперь приделываем роботу штанишки – к туловищу приклеиваем коробку средних размеров.
Руки – рулоны от пищевой фольги – и ноги – основы от новогодних хлопушек – привязываем веревками. Посередине на грудь приклеиваем для объемности фигурную упаковку, а штанишки украшаем двумя дисками.
На лицевой стороне головы прорезаем два круга и вставляем в отверстия формы для кексов – это наши глаза. Рот и сигнальные антенны на макушке делаем из закрученной проволоки.
Оставшуюся бобину из-под скотча разрезаем пополам и приклеиваем по бокам головы – это уши нашей игрушки.
Если малышу захочется, он может украсить своего нового друга аппликацией и даже на следующий день отнести в детский сад, чтобы похвастаться перед одногодками.
ILUШA vs Dynamixel. Выбор сервопривода с обратной связью
Сервопривод отечественного производства Илюша.
Мы разрабатываем робот для сбора мячей для гольфа. Для открытия люка сброса мячей нам требуется сервопривод. Мы опробовали огромное количество и сегодня хотим рассказать Вам об очень интересном аналоге Dynamixel который более, чем в два раза дешевле.
Современный модельный сервопривод сегодня представляет законченное устройство в едином корпусе (мотор вместе с редуктором и платой управления). Самым распространенным способом управления модельными сервами является протокол PWM, положение серводвигателя определяется шириной импульса, наличие импульсов служит сигналом включения. Данный подход позволяет максимально упростить электронику, однако не лишен и проблем.
Бесплатные онлайн-курсы по Automotive, Aerospace, робототехнике и инженерии (50+)
Спрос на крутых специалистов в автоиндустрии растёт и будет расти. В современных автомобилях строк кода больше, чем в космических кораблях, боевых самолетах и операционных системах. Доля стоимости ПО в автомобилях в скором времени дойдет до 50%. Каждый компонент автомобиля стремится стать «умным».
Предлагаем вашему вниманию подборку онлайн-курсов для самостоятельного изучения и повышения компетентности в области automotive.
Бесплатные курсы от edX (36)
от Chalmers University of Technology
Изучите основы пассивной и активной безопасности в автомобильной технике.
Длительность: 7 недель
Нагрузка: 10-20 часов в неделю
Сложность: Advanced
Цена: бесплатно (сертификат за $249)
Робот из пластиковых бутылок
Делать робота можно и из самого простого материала – пластиковых бутылок. Для поделки приготовьте:
- непрозрачную бутылку из-под колы;
- игрушечное ведерко из набора детской посуды;
- две вилки;
- три крышечки от пластиковых бутылок;
- два колеса от игрушечного автомобиля, соединенные шасси.

Снизу по бокам бутылки проделываем два отверстия, в которые продеваем шасси и прикручиваем колесики. Сгибаем две вилки – это руки – и крепим к туловищу сзади на болты. На голову надеваем ведерко, к которому прикрепляем две крышечки побольше – это глаза, и одну поменьше посередине – это рот. Украшаем робота, как подскажет фантазия.

Питание: драйвер двигателя, батарея
Драйвер двигателя должен иметь возможность управлять трехвольтовыми двигателями, выбранными ранее. Я также хотел, чтобы он был масштабируемым на случай, если я захочу в будущем заменить двигатели. Я нашел драйвер всё в том же магазине. Он может работать с напряжениями 0–11 В и обеспечивать достаточно большие токи для двигателей, которые я захотел бы поставить в будущем. По поводу аккумулятора, я бы предпочел, чтобы робот работал на чем угодно. Teensy работает с напряжениями до 5,5 В, что означает, что можно использовать литиевый аккумулятор. Однако для лития требуется зарядное устройство, а я не хочу увеличивать расходы. Использование двух обычных батарей AA обеспечивает довольно много энергии без необходимости зарядного устройства. Недостатком является то, что они обеспечивают только ~3 В и большие по размеру. Входное напряжение 3 В неже линейного стабилизатора Teensy на 3,3 В. Робот всё равно будет работать, потому что все компоненты, выбранные для Teensy, могут работать на более низком напряжении. Тем не менее, встроенный на Teensy стабилизатор напряжения стабилизировать не будет.
Материалы
Существует много материалов, которые вы можете использовать для создания основания. Вы используете все множество материалов для создания не только роботов, но и других устройств. Следовательно вы получите хорошее представление о том, что наиболее подходит для данного проекта.
Список предлагаемых строительных материалов, приведенных ниже включает только наиболее распространенные. Как только вы используете некоторые из них, вы сможете поэкспериментировать с теми, которые не входят в список, или объединить их вместе.
Использовать существующие коммерческие продукты
Вероятно, вы видели школьные проекты, которые были основаны на существующих массовых продуктах. В первую очередь таких как бутылки, картонные коробки и т.д. Это, по сути, «повторное использование» продукта.
Оно может либо сэкономить вам много времени и денег. Хотя и может создать дополнительные хлопоты и головную боль. Есть много очень хороших примеров того, как перепрофилировать материалы и сделать из них очень хорошего робота.
Основной строительный материал
Например, изготовление робота из картона. Некоторые из самых основных строительных материалов могут быть использованы для создания отличных каркасов. Одним из самых дешевых и наиболее доступных материалов является картон. Вы часто можете найти картон бесплатно, и его можно легко вырезать, согнуть, склеить и сложить.
Может быть вы можете создать усиленную картонную коробку, которая выглядит намного более красиво. И она соответствует размеру вашего робота. Затем вы можете нанести эпоксидную смолу или клей, чтобы сделать ее более долговечной. В заключение дополнительно можно разукрасить ее.
Плоский материал для конструкции
Один из наиболее распространенных способов сделать раму – это использовать стандартные материалы, такие как лист фанеры, пластика или металла. И просверлить отверстия для подключения всех исполнительных механизмов и электроники. Прочный кусок фанеры может быть довольно толстым и тяжелы. В то самое время как тонкий лист металла может быть слишком гибким.
Например, доску или фанеру из плотной древесины можно легко разрезать с помощью пилы, просверлить (не опасаясь разрушения), покрасить, отшлифовать и т.д. Следовательно вы можете устанавливать устройства с двух сторон. Например, подключить двигатели и колесики колес к нижней части, а электронику и аккумулятор к верхней части. При этом древесина останется неподвижной и твердой.
Лазерная резка, изогнутый пластик или металл
Если вы находитесь на том этапе, когда вам необходим внешний блок, то лучшим вариантом будет высокоточная резка деталей лазером. Любая ошибка в расчетах будет дорогостоящей и приведет к порче материалов. Для изготовления робота нужна собственная мастерская. Возможно нужно найти компанию, производящую такой тип роботов. Может быть она предлагает множество других услуг, включая работы с металлом и покраску.
3D-печать
3D принтер, печатающий раму или каркас, редко бывает наиболее обоснованным решением (потому что он печатает послойно). В результате этого процесса можно создавать очень сложные формы. Такие формы было бы невозможно (или очень сложно) изготовить другими способами.
Отдельная трехмерная печатная деталь может содержать все необходимые монтажные точки для всех электрических и механических компонентов. При этом способе изготовления каркаса сохраняется незначительный вес изделия. Изготовление робота потребует дополнительной обработки и шлифовки.
Поскольку 3D-печать становится более популярной, цена на детали также снижается. Дополнительно преимуществом 3D-печати является не только то, что ваш дизайн легко воспроизводить, но и им легко делиться. При помощи нескольких кликов мышки можно получить все инструкции по дизайну и файлы САПР.
Полиморф
При комнатной температуре полиморф является твердым пластиком. При нагревании (например, в горячей воде) он становится податливым и может быть сформирован в сложные детали. Затем они охлаждаются и затвердевают в прочные пластмассовые детали.
Обычно пластиковые детали требуют высоких температур и необходимы различные формы для изготовления. Изготовление робота таким способом делает их недоступными для большинства любителей. Например, вы можете комбинировать различные формы (цилиндры, плоские листы и т.д.).
Так формируются сложные пластмассовые структуры, которые выглядят как сделанные промышленным способом. Вы также можете экспериментировать с различными формами и достичь с помощью этого материала многого.
Разработка hardware-продуктов — что и как устроено
Привет, меня зовут Дмитрий Каржицкий, я работаю QA Lead в белорусском hardware-стартапе Rozum Robotics. Недавно вместе с Университетом Иннополис мы провели митап, посвящённый разработке hardware-продуктов. По следам митапа хочу рассказать про специфику разработки и тестирования роботов и про особенности организации работы в hardware-стартапе.
Кажется, что сфера hardware менее заметна, чем software, как минимум по количеству упоминаний. У всех на слуху разработчики в области веб- и мобильных приложений, которые пишут код на макбуках, попивая смузи. А у hardware специалистов скорее образ классического бородатого инженера, который может и плату спаять, и код написать. Если с задачей на разработку софта верхнего уровня хороший Java-программист должен справиться, то в embedded без понимания железа не обойтись.
Разработку новых продуктов, в том числе и в hardware, можно разделить на два больших направления: коммерческие продукты (стартапы) и научно-исследовательская деятельность (R&D). Процессы и подходы к разработке и тестированию могут быть похожи, отличаются задачи и масштаб. Продукт разрабатывается для конкретных пользователей на основе идеи и исследования, что потенциальным клиентам нужна ваша разработка. В таком подходе больше рисков. Один из рисков — сложность масштабирования продукта. Выпустить новую версию приложения недорого, а создать копию робота всё ещё довольно сложно и дорого. О других рисках я расскажу ниже.
Примеры из процесса разработки будут на основе коллаборативного робота-манипулятора (кобота) PULSE. Это такая подвижная железная рука, которую можно запрограммировать под разные задачи.
Под капотом Tesla Model 3: как поменялось hardware за 3 года
Перевод
Tesla Model 3 вышла три года назад. И все же, благодаря обновлениям программного обеспечения и замене аппаратного обеспечения (с HW 2.5 на HW 3.0), Tesla обещает сохранить актуальность Tesla 3 и подготовить ее к будущему с беспилотной ездой.
По крайней мере, так они обещают.
У среза подкованных в технологиях покупателей из Кремниевой Долины любовь к Tesla возведена в культ, и им всегда хочется большего. Они любят эти машины, им нравится, что они работают на электричестве, а к твитам Илона Маска они относятся как к религии.
Прежде всего, они восхищаются чистой, элегантной архитектурой автомобиля Tesla, разработанной с нуля. Tesla может добавлять новые функции и даже обновлять автомобили почти волшебным образом, по воздуху (OTA). Ни один из других OEM-производителей (их автомобили привязаны к устаревшим платформам) не разработал столь масштабный метод обновления программного обеспечения для автомобилей.
Фанаты Tesla, как правило, меньше переживают по поводу спорной функции «Автопилот». Они не концентрируются ни на том, что она делает, ни на том, что она не делает. Они предпочитают сосредоточиться на том, чем когда-нибудь автопилот может стать – исходя из обещаний Tesla. В дополнение к серии обновлений программного обеспечения, в прошлом году Tesla повысила ставки, обновив аппаратную составляющую – с Tesla HW 2.5 на HW 3.0.
Издатель/подписчик для распределённых отказоустойчивых бортовых систем реального времени в 1500 строк кода
Сап, котятки.
Я пришёл рассказать о проекте UAVCAN — новом сетевом стандарте для организации взаимодействия узлов и компонентов современных транспортных средств с высоким уровнем автономности/автоматизации. Название является акронимом от Uncomplicated Application-level Vehicular Communication And Networking (несложные бортовые сети и коммуникации уровня приложения).
В этой публикации объясняется текущее положение дел и тренды в области сложных бортовых систем, существующие и грядущие проблемы, как мы их решаем и каких успехов добились. Во второй части наши коллеги из Университета Иннополис подробно осветят практическую сторону внедрения UAVCAN на примере конкретных проектов.
Конъюнктура
Мы наблюдаем быстрый рост сложности бортовых систем, связанный с развитием функциональных возможностей транспортных средств (особенно беспилотных) в целом, и систем автоматического управления в частности.
Выбор компонентов
Первый шаг в любом проекте – выяснить, какие необходимы комплектующие. Чтобы быть полезным, роботу нужно несколько ключевых вещей: способ двигаться, думать и взаимодействовать с окружением. Чтобы снизить стоимость, мне нужно обойтись двумя колесами. Этот означает, что мне нужно управлять двумя отдельными двигателями, которые могут работать независимо друг от друга. Мне также нужна шаровая опора, на которую робот может опираться, чтобы скользить. У этого решения есть недостаток: робот не может перемещаться ни по каким поверхностям, кроме гладких полов. Я хочу, чтобы мозги были построены на базе какой-либо известной микроконтроллерной платформы. Так ему не понадобится программатор или руководство по использованию средств разработки. У робота должны быть датчики, которые позволяют ему знать о линиях, стенах и препятствиях. Я также хочу свести к минимуму количество разных мест для покупок, чтобы снизить итоговую стоимость доставки. Наконец, компоненты должны быть небольшими, потому что я хочу спроектировать плату для недорогого производства и оставаться в пределах бесплатной версии Eagle CAD.