Требования к вертолетам
Содержание:
- Модификация Сикорского
- Принцип работы
- Основные части вертолета, их назначение и компоновка
- Винтокрылые лошадки
- Современные разработки и будущее винтов самолета
- ФОРМУЛА ИЗОБРЕТЕНИЯ
- Вертолеты с поперечно расположенным несущим винтом
- Лопасть Оккама
- ПОСАДОЧНЫЕ УСТРОЙСТВА И ИХ ЭЛЕМЕНТЫ
- КОНСТРУКТИВНО-КИНЕМАТИЧЕСКИЕ СХЕМЫ ТРАНСМИССИИ ВЕРТОЛЕТОВ
- Европейский гибрид
Модификация Сикорского
Автомат перекоса Сикорского является надежным и отличается прочными стойками. Тарелки в данном случае применяются на 23 см. По мнению экспертов, проблемы с наклоном по тангажу возникают нечасто. Несущие винты у моделей находятся выше уровня тарелок. Установка по вертикали осуществляется очень быстро. Многие специалисты говорят о том, что регулировка по крену происходит очень плавно. Достигнут данный эффект был за счет установки небольших стоек. Предельный угол наклона по тангажу равняется 40 градусов.
Шаровые опоры применяются с накладками. Специалисты говорят, что блокираторы стойки в данном случае работают хорошо. Недостатком модификаций принято считать малый вращающийся момент. Кольца в устройствах изнашиваются довольно быстро. Отдельного внимания у модификаций заслуживают шарниры. Располагаются они в нижней части конструкции. Отклонение тарелок, таким образом, регулируется довольно просто.

Принцип работы
Каждая из лопастей несущего винта, по сути, представляет собой небольшое крыло, создающее подъёмную силу за счёт набегающего потока воздуха. При этом действующая на лопасть подъёмная сила зависит от ряда факторов, в том числе от скорости движения лопасти относительно воздуха, а также её установочного угла, то есть угла между хордой лопасти и плоскостью вращения винта. Чем больше этот угол, тем большую подъёмную силу обеспечивает лопасть несущего винта.
В большинстве конструкций обороты несущего винта стараются поддерживать постоянными. В этом случае единственной переменной величиной остаётся установочный угол лопастей. При его одновременном увеличении для всех лопастей (то есть увеличении общего шага винта) суммарно развиваемая ими подъёмная сила увеличивается, а при уменьшении — соответственно уменьшается, что обеспечивает управление движением по вертикали: когда тяга несущего винта превышает действующую на летательный аппарат силу тяжести, он увлекается вверх, и наоборот.
Наклон вертолёта вперёд или назад (по тангажу) и вбок (по крену) достигается созданием разницы подъёмных сил, развиваемых лопастями несущего винта при его вращении, в зависимости от того, где находится лопасть в каждый момент времени.
Так, например, для наклона вертолета вперёд, из-за гироскопической прецессии, лопасти несущего винта не меняют установочный угол, проходя над задней частью вертолёта, и над передней, напротив, максимальный и минимальный углы задаются тарелкой перекоса слева и справа или наоборот справа и слева, в зависимости от направления вращения винта, что приводит к соответствующему изменению их подъёмных сил. Их разность создаёт момент, заставляющий вертолёт наклониться вперёд.
Подъёмная сила несущего винта приложена к его втулке и только при неподвижном висении может быть рассмотрена как перпендикулярная к его плоскости. Для наклона вертолёта в какую-либо сторону ротор создаёт момент, за счет изменения шага лопастей на разных участках их движения.
Для понимания того, «выравнивает» ли сила тяжести вертолет, надо понять, относительно какой точки приложены моменты сил, и то, что вертолет свободно висит в воздухе, не имея неподвижной оси для вращения, наклона и т.п.
В вертолетостроении применяются две конструктивных схемы автомата перекоса: Юрьева и Сикорского. Несмотря на кажущееся отличие по внешнему виду и кинематической схеме, принцип действия обеих конструктивных схем одинаков. Циклический шаг каждой лопасти зависит от наклона тарелки автомата перекоса, а общий шаг винта регулируется перемещением тарелки автомата перекоса вдоль оси вращения. Автомат перекоса Сикорского нелегко отличить без сравнительного изображения от автомата перекоса Юрьева по внешнему виду: конструкция Сикорского содержит небольшие дополнительные серволопасти, а у юрьевского автомата перекоса их нет.
Угол установки каждой лопасти управляется через тягу. Эти тяги идут от плоскости вращения лопастей вниз, где крепятся к вращающемуся кольцу автомата перекоса (внутренняя тарелка), который вращается вместе с лопастями, но в плоскости, управляемой невращающимся кольцом. При отклонении плоскости этих колец относительно плоскости вращения винта вертолёта, угол установки каждой лопасти, в процессе своего кругового движения, меняется тягами, подсоединёнными к внутреннему кольцу. Кольца могут быть скреплены между собой осевым подшипником, внутреннее кольцо закреплено на оси ротора с помощью сферического подшипника. Внешнее кольцо заблокировано от прокручивания и установлено в рамки для управления продольным и боковым отклонением плоскости тарелки.
Общий шаг несущего винта обычно регулируется через перемещение внутреннего кольца вдоль вала. Таким образом, тяги смещают шарниры крепления с лопастями и меняют угол установки каждой лопасти на одинаковое значение.
Основные части вертолета, их назначение и компоновка
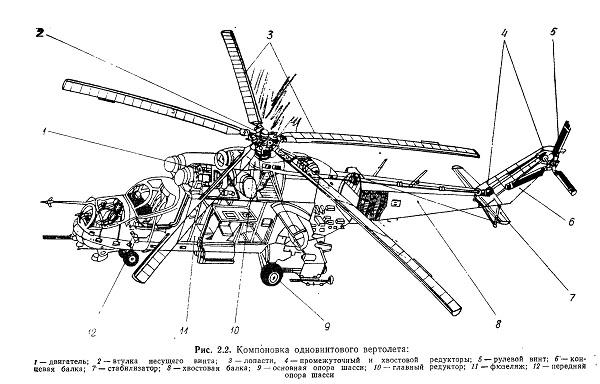
В процессе развития вертолетостроения сложился вполне определенный облик современного вертолета.
Основной частью вертолета является фюзеляж, предназначенный для размещения грузов, экипажа, оборудования, топлива и т. п. Кроме того, он является силовой базой, к которой крепятся все остальные части вертолета и передаются нагрузки от них. Фюзеляж представляет собой тонкостенную подкрепленную конструкцию. Центральная часть фюзеляжа обычно является грузовой кабиной, носовая — кабиной экипажа.
Хвостовая 8 и концевая 6 балки являются продолжением фюзеляжа и предназначены для размещения рулевого винта и оперения вертолета.
На потолочной панели центральной части фюзеляжа устанавливаются двигатели 1 (обычно два газотурбинных двигателя), выходные валы которых соединяются с главным редуктором.
Главный редуктор распределяет мощность, поступающую от двигателей, между агрегатами вертолета. Основным потребителем мощности двигателей является НВ, установленный на валу главного редуктора. Он предназначен для создания силы тяги, необходимой для полета вертолета, а также для продольного и поперечного управления.
Основными частями НВ являются: втулка 2 и прикрепленные к ней лопасти 3, непосредственно создающие подъемную силу.
При вращении НВ на вертолет действует реактивный момент, стремящийся развернуть его в противоположном направлении. Для уравновешивания этого момента служит рулевой винт 5. Его привод осуществляется от главного редуктора через систему валов и редукторов. Кроме того, рулевой винт используется для путевого управления вертолетом.
Шасси обеспечивает обирание вертолета при стоянке и передвижении по поверхности земли, а также снижение нагрузок при посадке.
Наибольшее распространение получила трех-опорная схема шасси с носовым колесом: основные опоры 9 располагаются позади центра масс вертолета, передняя 12—под носовой частью фюзеляжа. На скоростных вертолетах шасси может убираться в полете.
Оперение предназначено для повышения устойчивости вертолета. Оно состоит из стабилизатора 7 и киля, роль которого играет обычно специально спрофилированная концевая балка.
Винтокрылые лошадки
Ликбез по семи основным вертолетным схемам
За последнее время в мире вертолетной техники произошло несколько значимых событий. Американская компания Kaman Aerospace объявила о намерении возобновить производство синхроптеров, Airbus Helicopters пообещала разработать первый гражданский вертолет с электродистанционным управлением, а немецкая e-volo — испытать 18-роторный двухместный мультикоптер. Чтобы не запутаться во всем этом разнообразии, мы решили составить краткий ликбез по основным схемам вертолетной техники.

Впервые идея летательного аппарата с несущим винтом появилась около 400 года нашей эры в Китае, однако дальше создания детской игрушки дело не пошло. Всерьез инженеры взялись за создание вертолета в конце XIX века, а первый вертикальный полет нового типа летательного аппарата состоялся в 1907 году, спустя всего четыре года после первого полета братьев Райт. В 1922 году авиаконструктор Георгий Ботезат испытал вертолет-квадрокоптер, разработанный по заказу Армии США. Это был первый в истории устойчиво управляемый полет техники такого типа. Квадрокоптер Ботезата сумел взлететь на высоту пяти метров и провел в полете несколько минут.
С тех пор вертолетная техника претерпела множество изменений. Появился класс винтокрылых летательных аппаратов, который сегодня делится на пять типов: автожир, вертолет, винтокрыл, конвертоплан и X-крыло. Все они отличаются конструкцией, способом взлета и полета, управлением несущим винтом. В этом материале мы решили рассказать именно о вертолетах и их основных типах. При этом за основу была взята классификация по компоновке и расположению несущих винтов, а не традиционная — по типу компенсации реактивного момента несущего винта.

Вертолет является винтокрылым летательным аппаратом, у которого подъемная и движущая силы создаются одним или несколькими несущими винтами. Такие винты располагаются параллельно земле, а их лопасти устанавливаются под определенным углом к плоскости вращения, причем угол установки может изменяться в достаточно широких пределах — от нуля до 30 градусов. Установка лопастей на ноль градусов называется холостым ходом винта или флюгированием. В этом случае несущий винт не создает подъемной силы.
Во время вращения лопасти захватывают воздух и отбрасывают его в направлении, противоположном движению винта. В результате перед винтом создается зона пониженного давления, а за ним — повышенного. В случае вертолета так возникает подъемная сила, которая очень похожа на образование подъемной силы фиксированным крылом самолета. Чем больше угол установки лопастей, тем большую подъемную силу создает несущий винт.
Характеристики несущего винта определяются двумя основными параметрами — диаметром и шагом. Диаметр винта определяет возможности вертолета по взлету и посадке, а также отчасти величину подъемной силы. Шаг винта — это воображаемое расстояние, которое воздушный винт пройдет в несжимаемой среде при определенном угле установки лопастей за один оборот. Последний параметр влияет на подъемную силу и скорость вращения ротора, которую на большей части полета летчики стараются держать неизменной, меняя только угол установки лопастей.

При полете вертолета вперед и вращении несущего винта по часовой стрелке, набегающий поток воздуха сильнее воздействует на лопасти с левой стороны, из-за чего возрастает и их эффективность. В результате левая половина окружности вращения винта создает большую подъемную силу, чем правая, и возникает кренящий момент. Для его компенсации конструкторы придумали автомат перекоса — это особая система, которая уменьшает угол установки лопастей слева и увеличивает его справа, выравнивая таким образом подъемную силу по обе стороны винта.
В целом, вертолет имеет несколько преимуществ и несколько недостатков перед самолетом. К преимуществам относится возможность вертикального взлета и посадки на площадки, диаметр которых в полтора раза превосходит диаметр несущего винта. При этом вертолет может на внешней подвеске перевозить крупногабаритные грузы. Вертолеты отличаются и лучшей маневренностью, поскольку могут висеть вертикально, лететь боком или задом-наперед, поворачиваться на месте.
К недостаткам же относятся большее, чем у самолетов, потребление топлива, большая инфракрасная заметность из-за горячего выхлопа двигателя или двигателей, а также повышенная шумность. Кроме того, вертолетом в целом сложнее управлять из-за ряда особенностей. Например, летчикам вертолетов знакомы явления земного резонанса, флаттера, вихревого кольца, эффекта запирания несущего винта. Эти факторы могут приводить к разрушению или падению машины.


Современные разработки и будущее винтов самолета
Технологии и опыт работы позволяют конструкторам преодолеть некоторые проблемы с шумностью и повысить тягу, миновав ограничения.
Таким образом удалось миновать эффект запирания за счет применения мощного турбовинтового двигателя типа НК-12, который передает мощность на два соосные винта. Их вращение в разные стороны позволило миновать запирание и повысить тягу.

Также используются на винтах тонкие саблевидные лопасти, которые имеют возможность затягивания кризиса. Это позволяет достичь более высоких показателей скорости. Такой тип винтов установлен на самолете типа Ан-70.
На данный момент ведутся разработки по созданию сверхзвуковых винтов. Несмотря на то что проектирование ведется очень долго при немалых денежных вливаниях, достичь положительного результата так и не удалось. Они имеют очень сложную и точную форму, что значительно затрудняет расчеты конструкторов. Некоторые готовые винты сверхзвукового типа показали, что они очень шумные.
Заключение винта в кольцо – импеллер – является перспективным направлением развития, поскольку снижает концевое обтекание лопастей и уровень шума. Также это позволило повысить безопасность. Существуют некоторые самолеты с вентиляторами, которые имеют ту же конструкцию, что и импеллер, но дополнительно оснащаются аппаратом направления воздушного потока. Это значительно повышает эффективность работы винта и двигателя.
https://youtube.com/watch?v=HFM0Q_quyhM
ФОРМУЛА ИЗОБРЕТЕНИЯ
1. Автомат перекоса несущего винта вертолета, содержащий направляющий стакан, жестко закрепленный на неподвижном корпусе редуктора симметрично приводному валу несущего винта вертолета, ползун со сферической наружной поверхностью, установленный на направляющем стакане посредством антифрикционного вкладыша с возможностью линейного перемещения вдоль оси вращения вала, кольцо управления с антифрикционным вкладышем, подвижно установленное на сферической поверхности ползуна и снабженное устройством предотвращения углового перемещения вокруг направляющего стакана, кинематически соединенное посредством сферических подшипников с системой управления общим и циклическим шагом несущего винта, наружное кольцо, установленное на кольце управления с помощью шарикоподшипников и связанное с втулкой несущего винта с помощью двухзвенного шлиц-шарнира, одно звено которого шарнирно соединено с вращающейся втулкой несущего винта, а другое посредством сферического подшипника — с наружным кольцом, тяги поворота лопасти, закрепленные с помощью сферических подшипников одной стороной с наружным кольцом, а другой — с рычагом управления шагом лопасти несущего винта, отличающийся тем, что кольцо управления изготовлено сборным, причем нижняя часть его выполнена в виде консольной системы с ушками на концах консолей для кинематического соединения кольца с системой управления общим и циклическим шагом несущего винта и снабжена сверху и снизу фланцами соответственно большего и меньшего диаметра, которыми она жестко соединена с верхней частью кольца управления, образуя между собой жесткую кольцевую коробчатую конструкцию, и наружное кольцо выполнено в виде рамы с формой равностороннего многоугольника, число углов которого равно количеству лопастей, при этом на углах рамы выполнены вилки для соединения наружного кольца с ушками тяг поворота лопастей.
2. Автомат перекоса по п.1, отличающийся тем, что кольцо управления выполнено из разнородных материалов, причем нижняя часть изготовлена из легкого сплава, например, алюминиевого, а верхняя часть, например, из легированной стали, для установки на ней внутренних колец шарикоподшипников.
3. Автомат перекоса по п.1, отличающийся тем, что наружное кольцо выполнено сборным из разнородных материалов, внутри которого жестко закреплена гильза, выполненная, например, из легированной стали, для установки в ней наружного кольца шарикоподшипников, а рама изготовлена из легкого, например, алюминиевого сплава.
4. Автомат перекоса по п.1, отличающийся тем, что консоли с ушками расположены на кольце управления под углом 90° друг к другу.
5. Автомат перекоса по п.1, отличающийся тем, что устройство предотвращения углового перемещения кольца управления выполнено в виде двухзвенного шлиц-шарнира, одно звено которого шарнирно присоединено к направляющему стакану с возможностью поворота в плоскости, проходящей через ось вращения вала несущего винта, а другое — с жестко закрепленным на кольце управления кронштейном при помощи сферического подшипника, ось вращения последнего расположена в плоскости поворота первого звена.
6. Автомат перекоса по п.1, отличающийся тем, что внутренние элементы рамы наружного кольца выполнены с -образным поперечным сечением, а стороны — с -образным поперечным сечением.
7. Автомат перекоса по п.1, отличающийся тем, что в цилиндрических шарнирах и сферических подшипниках установлены антифрикционные вкладыши, например, из органита и/или органоволокнита.
8. Автомат перекоса по п.8, отличающийся тем, что поверхности, контактирующие с антифрикционными вкладышами, выполнены с износостойким покрытием, например, твердым хромом и/или твердым оксидом.
9. Автомат перекоса по п.1, отличающийся тем, что ушки кольца управления шарнирно соединены с бустерами, последние соединены с системой управления общим и циклическим шагом несущего винта вертолета.
Вертолеты с поперечно расположенным несущим винтом

Преимущество такого вертолета кроется в снижении мощности, необходимой для поступательного движения
Это особенно важно в многомоторных вертолетах, которые должны продолжать двигаться в горизонтальном направлении при остановившемся моторе
Недостаток таких машин — высокое сопротивление ввиду лобового сопротивления конструкции, на которую опираются несущие винты. Обтекаемость и снижение габаритов конструкции увеличивает вес вертолета.
Вертолет с поперечным расположением винтов оснащен более сложной трансмиссией и обладает большими габаритами, хотя на них влияет степень перекрытия несущего винта. Одним из самых крупных и тяжелых вертолетов такой конструкции является Ми-12.
Лопасть Оккама
Технологический предел скорости вертолета определяется разницей в скорости движения наступающей и отступающей лопастей несущего винта относительно воздуха. Скорость движения вертолета прибавляется к скорости наступающих лопастей и вычитается из скорости отступающих лопастей. Если угол атаки лопастей на наступающей и отступающей сторонах ротора будет оставаться неизменным, подъемная сила на наступающей стороне будет значительно больше, чем на отступающей, и вертолет перевернется. Автомат перекоса вертолета классической схемы устроен так, чтобы компенсировать эту разницу, циклически уменьшая угол атаки лопастей на наступающей стороне и увеличивая на отступающей. Это значит, что винт ни при каких обстоятельствах не сможет реализовать весь потенциал подъемной силы: даже при максимальном угле атаки лопастей отступающей стороны подъемная сила наступающей стороны будет далека от максимально возможной.
Винтокрыл Ка-22 был разработан в конце 50-х годов для военно-воздушных сил СССР. Грузовой аппарат с двумя несущими и двумя толкающими роторами мог принимать на борт до 16,5 тонн груза и летать со скоростью 350 км/ч. Интересно, что на высокой скорости несущие винты переходили в режим авторотации, и аппарат превращался в огромный автожир. Ка-22 совершил свой первый полет 15 августа 1959 года. В августе 1964 один из опытных образцов винтокрыла вошел в неконтролируемый правый поворот, за которым последовало сваливание. Из пяти членов экипажа лишь троим удалось катапультироваться. После трагической аварии проект был закрыт.
Так же расточительно мы обращаемся с подъемной силой, заставляя вертолет лететь вперед. Чтобы набрать скорость, приходится увеличивать угол атаки лопастей в задней части ротора и уменьшать в передней. Максимального угла атаки всех лопастей, равно как и максимально возможной подъемной силы, мы не получим.
Схема с двумя пересекающимися роторами, установленными под небольшим углом друг к другу, была впервые применена в 1942 году в нацистской Германии для небольшого противолодочного вертолета Flettner Fl 282 Kolibri. Ее придумал конструктор Антон Флеттнер, который после войны присоединился к американской компании Kaman. Основное преимущество синхрокоптеров, как иногда называют вертолеты с пересекающимися роторами, заключается в повышенной стабильности при зависании. Кроме того, синхрокоптеры работают значительно тише вертолетов, построенных по классической схеме. На сегодняшний день в мире эксплуатируется около 40 вертолетов K-Max.
Интересно, что в вертолетах соосной схемы (большинство моделей Камова) для обоих винтов используется практически такой же автомат перекоса, как в одновинтовых машинах. Роторы, вращающиеся в противоположные стороны, компенсируют потерю подъемной силы на отступающих лопастях без помощи автомата перекоса, поэтому схема Камова превосходит классическую по энерговооруженности. Но необходимость создавать горизонтальную тягу с помощью несущих винтов по‑прежнему заставляет идти на энергетический компромисс.
Sikorsky S-72 — это уникальная гибридная экспериментальная платформа с несущим крылом, основным и рулевым роторами и двумя реактивными двигателями, предназначенная для испытания различных вертолетных схем. Летающая лаборатория впервые оторвалась от земли 12 октября 1976 года. Основной ротор S-72 был сбрасываемым: если в полете что-то шло не по плану, испытатели могли одним нажатием кнопки превратить вертолет в реактивный самолет и вернуться на аэродром. На Sikorsky S-72 была испытана концепция ротора X-wing, широкие и жесткие лопасти которого после набора высоты останавливались и играли роль несущего крыла.
В соосной схеме Sikorsky X2 автомат перекоса не несет компенсаторных функций. Несущие винты не отвечают за создание горизонтальной тяги и компенсируют взаимное стремление к крену, поэтому необходимость в циклическом изменении шага винта отпадает. И наступающая, и отступающая стороны ротора X2 всегда развивают максимум подъемной силы. Специалисты Sikorsky называют эту технологию ABC (концепция наступающей лопасти, Advancing Blade Concept). Согласно ABC подъемная сила определяется мощью наступающей лопасти, а не ограничивается возможностями отступающей. Это означает, что вертолет станет экономичнее и сможет преодолевать большие расстояния без дозаправки. Но главное, что по сравнению с вертолетами привычных схем он сможет поддерживать высоту при меньшей скорости вращения главного ротора. А это один из определяющих факторов максимальной скорости.
ПОСАДОЧНЫЕ УСТРОЙСТВА И ИХ ЭЛЕМЕНТЫ
Наличие на вертолете аварийных посадочных баллонетов не исключает возможности для вертолета производить посадку и транспортировку на своих колесах по аэродрому и палубе.
Как правило, на вертолетах применяется колесное шасси. На стоянке вертолет обычно имеет три точки опоры. Если колеса главных ног располагаются позади центра массы, то его третья опора (или две опоры) устанавливается под носовой частью вертолета, а система носит название шасси с передним, или носовым, колесом.
Шасси с носовым колесом на вертолетах одновинтовой схемы имеет на конце хвостовой балки опору с амортизацией. На транспортном вертолете с грузовым люком ее целесообразно убирать, чтобы обеспечить свободный доступ загружаемой техники к погрузочной рампе.
Угол опрокидывания 0 определяют из соображения безопасности посадки вертолета с самовращающимся НВ. Стояночный угол £ (между строительной горизонталью фюзеляжа вертолета и поверхностью посадочной площадки) необходим для облегчения рулетки вертолета (£ = 2—3°) или загрузки через задний грузовой люк (тогда угол £ отрицательный).
Если на нижней поверхности носовой части фюзеляжа вертолета по конструктивным или эксплуатационным соображениям нельзя установить переднюю стойку шасси, то применяется схема с хвостовой стойкой. В этом случае перед посадкой вертолета на режиме авторотации необходимо соответственно уменьшать угол тангажа фюзеляжа.
Посадочное устройство, у которого главные ноги шасси расположены впереди центра массы вертолета, а третья опора — в его хвостовой части, носит название шасси с хвостовым колесом.
На гражданских вертолетах применяется, как правило, шасси с носовым колесом. Данная схема имеет существенные преимущества по сравнению с шасси с хвостовым колесом, среди них — безопасная и более простая посадка вертолета в условиях плохой видимости и хорошая путевая устойчивость при разбеге и пробеге.
Для обеспечения разворотов и устойчивости движения вертолета по аэродрому на передней (или хвостовой, в зависимости от схемы шасси) стойке устанавливается самоориентирующееся колесо. В результате свободной ориентации колеса на передней стойке шасси может возникнуть поперечное автоколебание — «шимми». Эта форма автоколебания возникает вследствие взаимодействия сил со стороны посадочной площадки с инерционными и упругими силами конструкции передней стойки шасси.
Колеса главных ног шасси делаются не ориентирующимися, с тормозами. Тормоза менее мощные, чем у самолетов, т.к. вертолет при посадке в основном тормозит НВ, а для разворотов при рулетке использует путевое управление. Тормоза на колесах главных ног шасси служат для сокращения длины пробега вертолета после посадки, фиксации вертолета на наклонной площадке и на палубе корабля.
КОНСТРУКТИВНО-КИНЕМАТИЧЕСКИЕ СХЕМЫ ТРАНСМИССИИ ВЕРТОЛЕТОВ
Трансмиссия одновинтового вертолета Ми-8 с РВ ( 4.2.1) включает в себя: главный редуктор (ГР) 2; тормоз НВ 3; хвостовой вал 4; промежуточный редуктор (ПР) 5; промежуточный вал 6; редуктор РВ 7; вал привода вентилятора масляно-воздушного радиатора 1. Мощность на привод НВ и РВ, агрегатов, обеспечивающих работу систем вертолета (насосов гидро- и маслосистем, электрогенератора, компрессора и датчика тахометра), поступает от правого и левого двигателей через ГР.
ГР устанавливается на вертолете на подкосах подредукторной рамы в верхней части вертолета. ПР предназначен для изменения направления передачи мощности. Редуктор РВ изменяет направление передачи мощности от ПР и понижает частоту вращения рулевого вала.
На легком вертолете ОН-6А фирмы Хьюз применена ККС трансмиссии. Характерным для этого вертолета является размещение двигателя и воздушного масло радиатора 2, применение сверхкритического вала 5 с демпфером 4 и отсутствие ПР. Вывод газовой струи в заднюю часть фюзеляжа 7 уменьшает его аэродинамическое сопротивление, а привод вентилятора маслорадиатора непосредственно от главного вала и исключение ПР существенно снижают общую массу трансмиссии.
Европейский гибрид
Следующий рекордсмен — аппарат X3 Hybrid разработан европейской корпорацией Eurocopter. Впервые поднялся в небо с площадки военной базы Istres – Le Tube (Франция) в 2010 году. После года испытательных полетов создателям удалось довести крейсерскую скорость вертолета до 430 км/ч.
Дальнейшее совершенствование конструкции и летно-технических характеристик позволило европейскому летательному аппарату установить неофициальный рекорд скорости для винтокрылых машин — 472 км/ч при горизонтальном полете и 487 км/ч — при пикирующем. Почему неофициальный? Да, потому что Eurocopter X3 не совсем вертолет.
Базой для создания машины послужила серийная модель EC155 Dauphin. Конструкторы дополнили «исходник» двумя газотурбинными авиамоторами с тянущими винтами, расположенными на небольших крыльях. Таким образом, Eurocopter X3 представляет собой, скорее, гибрид вертолета и самолета. Проект находится в фазе финальных тестовых испытаний и разработчики утверждают, что в скором времени стартует серийное производство.